Jedna z prvních otázek, kterou jsem dostal (hned po té „A fakt to jako funguje, jo?“) byla jaký má OGN krabička dosah v porovnání s FLARMem. Zpočátku to byla dost zapeklitá a zákeřná záležitost, protože to nikdo prostě neveděl.
Jak víme už z mateřské a základní školy, vlivů na šíření signálu je mnoho a občas není úplně jednoduché to změřit. V době, kdy už bylo jakž takž rozhodnuto o velikosti, tvaru a poloze protiváhy jsem ještě sháněl rozumnou anténku, nejlépe s kloubem (a našel!), která by umožňovala umístit tracker tak, aby moc nezavazel, anténa byla vertikálně a GPS anténa směrovala nahoru k obloze.
Měření jsme zpočátku prováděli tak, že za neplachtového dne jsme s pekárníkem Martinem skočili do (tehdy jeste létajícího) Foxe a letěli od letiště, dokud nám PKčko po rádiu nezavolal, že jsme se mu ztratili z trackingu. Následně jsme létali po roztodivných tratích zpět směrem k letišti až jsme se mu opět ukázali na monitoru. Težký život experimentátorů 🙂
Až o něco později jsme narazili na KTRAX Range Analyzer kde se dá vyčíst dosah mnohem lépe, přehledněji a hlavně – snad i objektivněji.
Jak daleko jde tedy vidět pokusná a historicky první krabička?
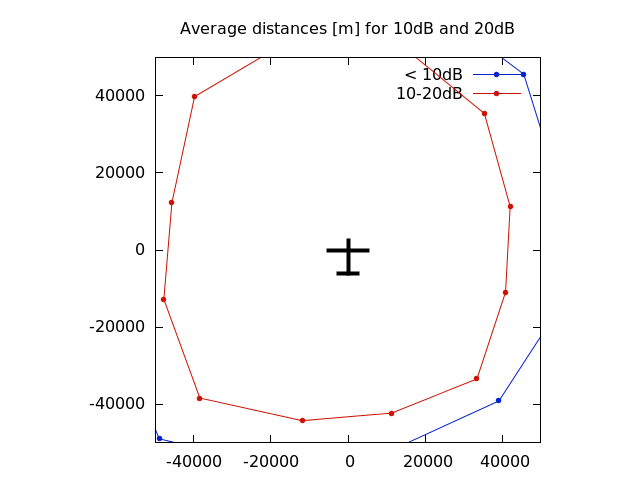
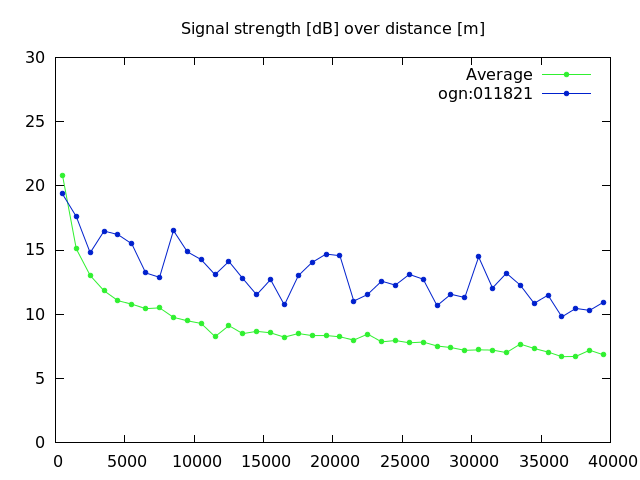
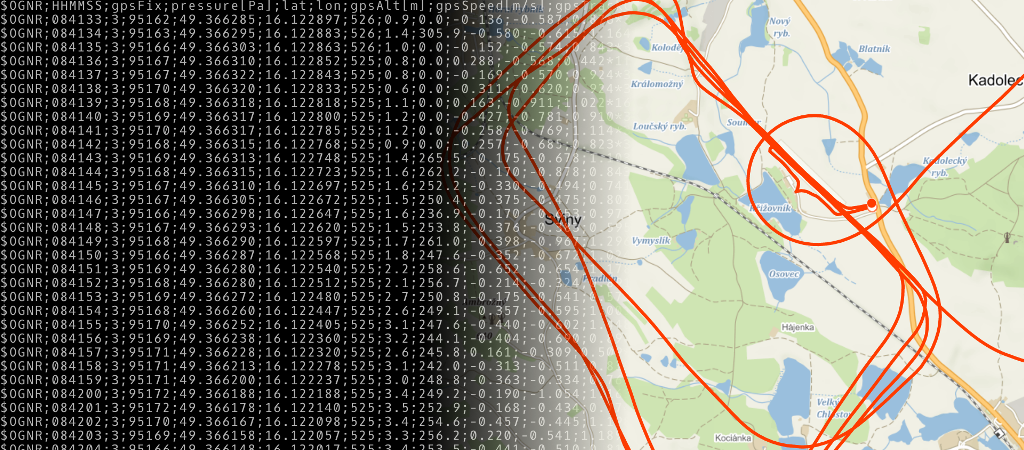
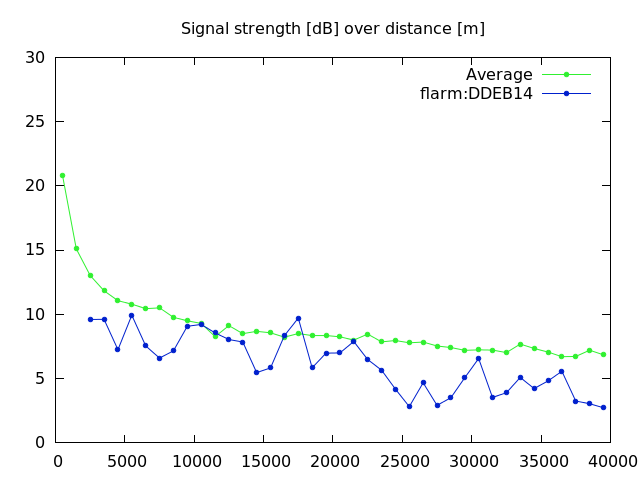
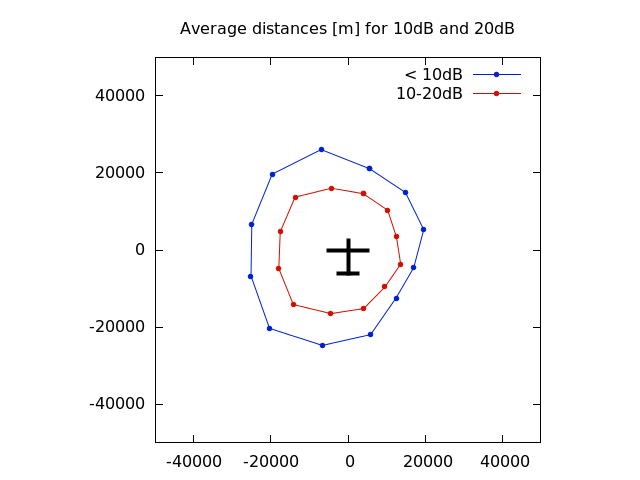
Pekelně daleko! 🙂 Síla signálu se drží vysoko nad průměrem (horní obrázek – zelená čára je průměrná síla signálu v OGN síti). Samozřejmě záleží na přijímači (kde Sauronovo oko či Křešín tomu hodně napomáhají, jak umístěním, tak použitou anténou, případně dodatečným LNA). Nicméně záznam z KTRAXu údajně vychází z dlouhodobější statistiky, takže tento vliv snad vylučuje. 20dB na 40km se zdá být jako velmi pěkný výsledek!
A jak jsou na tom FLARMy? Popravdě řečeno – težko tak od boku hodnotit. Ze zaznamenaných dat jsem náhodně vybral cca 30 různých ID a podíval se na jejich charakteristiky a našel v nich hodně rozdílů.
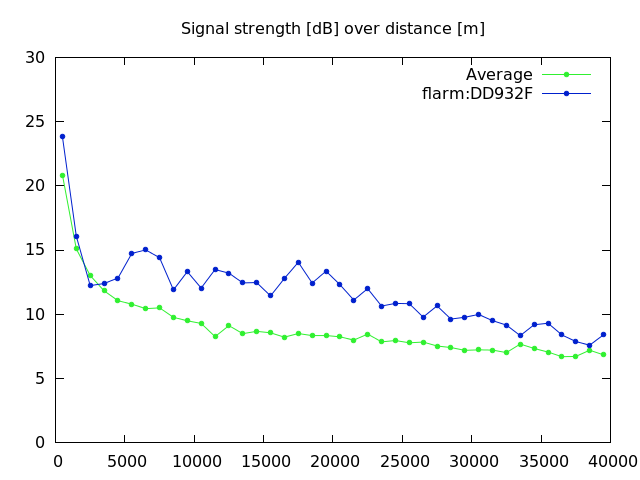
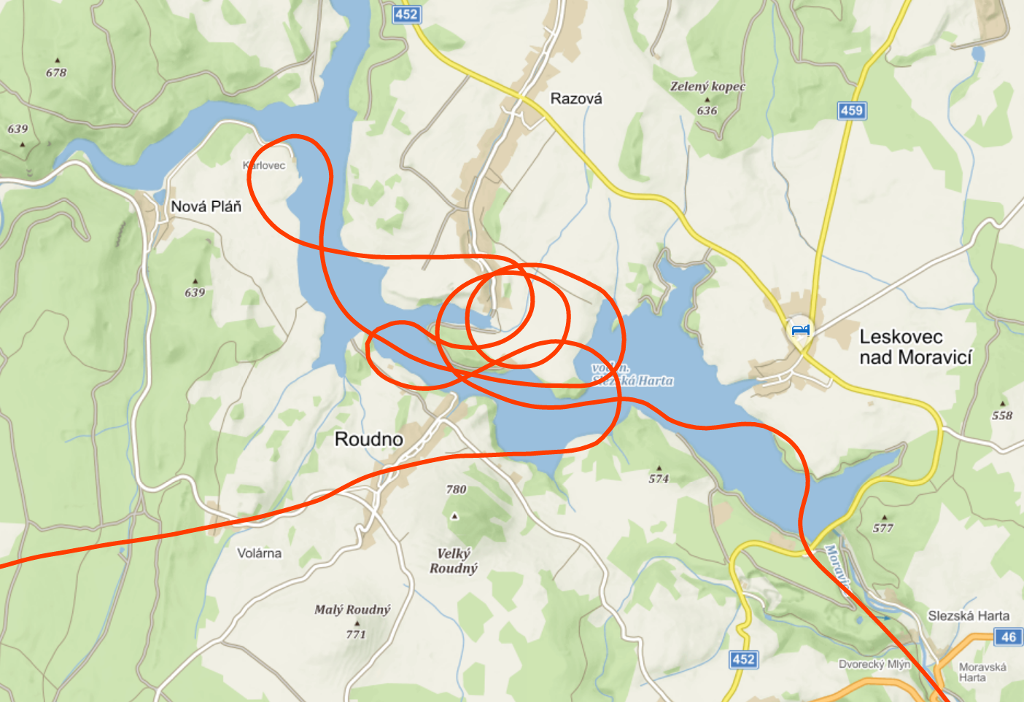
Za typický příklad jsem vybral id DD932F, ale klidně bychom mohli uvažovat i DD94DD nebo DD9A1C. Ve 40km na hranici 10dB.
V tuto chvíli bych se odvážil vyslovit, že dosah je tak poloviční 🙂 Takže buď se tu jedná o dobře odvedenou práci na OGN krabičce, nebo jen špatně interpretuji, co je zde vlastně zobrazeno – můžete mě případně opravit v diskuzi?
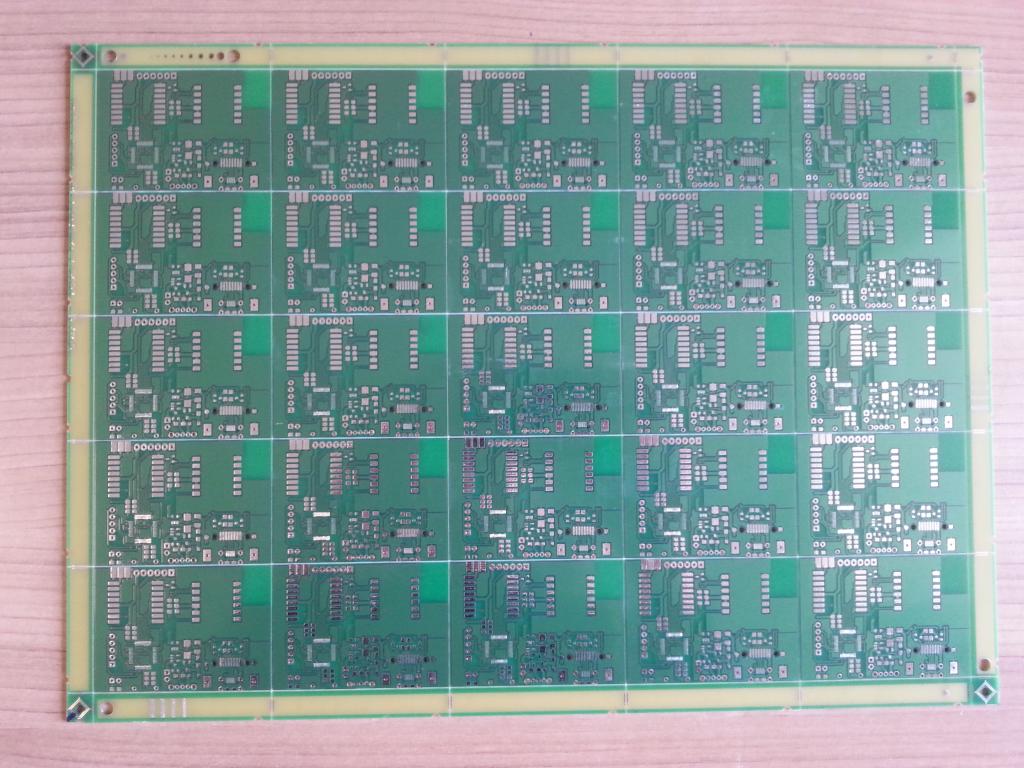
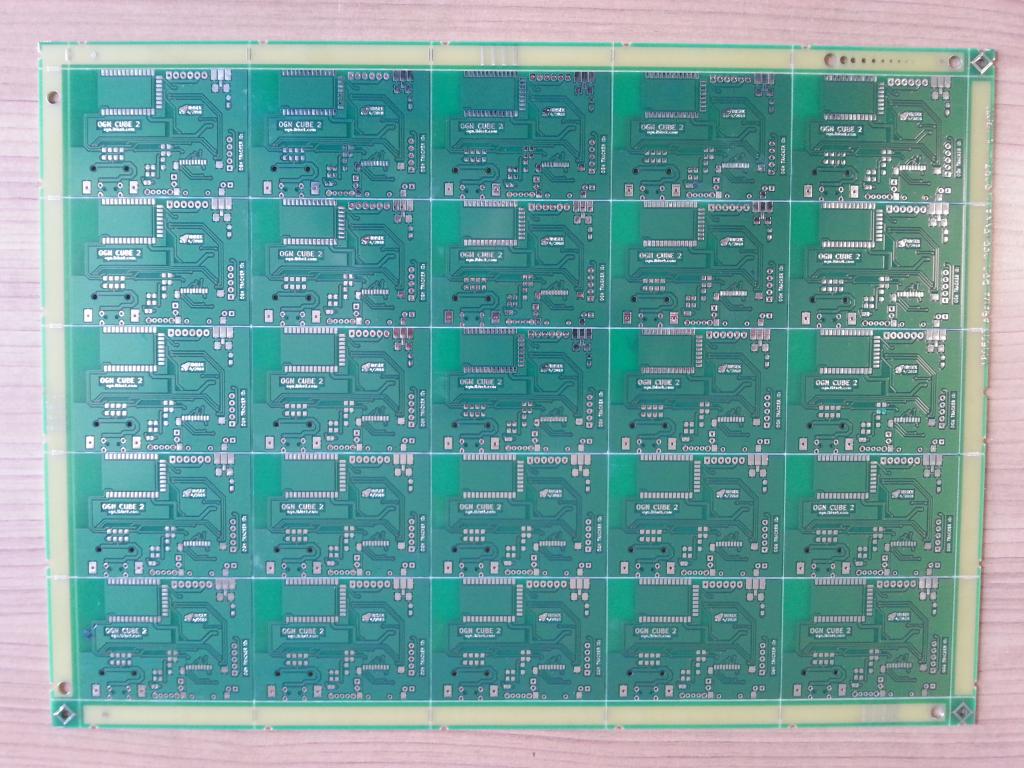
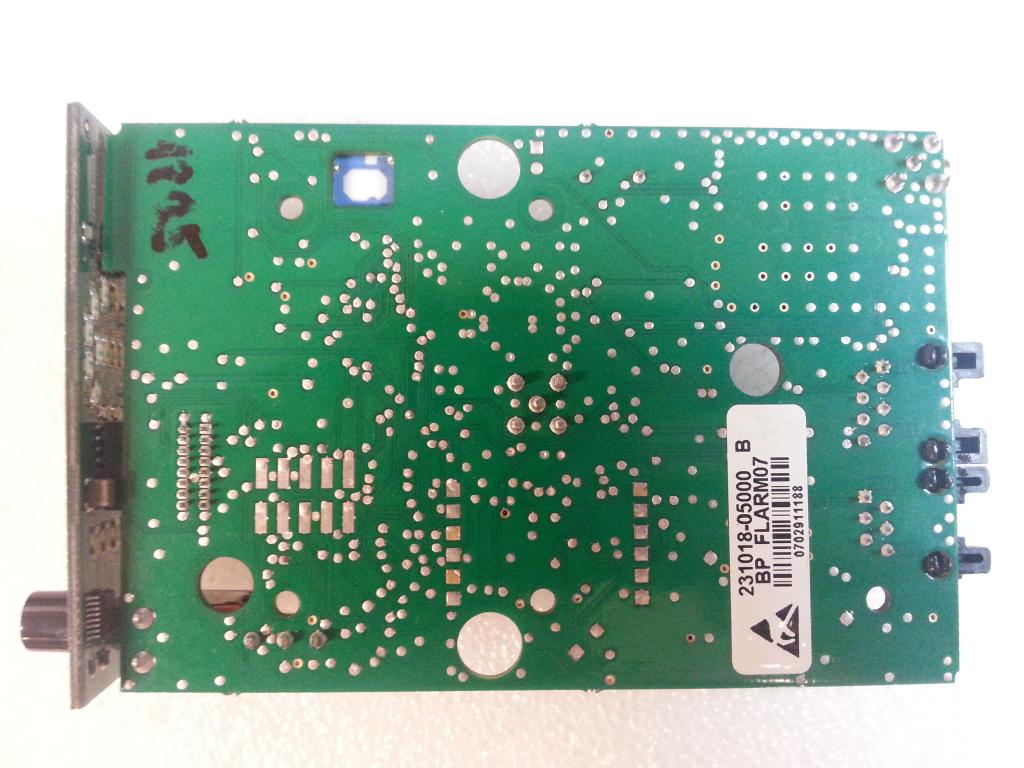
Kdo kdy viděl anténu a vnitřnosti FLARMu by se možná až tak nedivil. Pogumovaný kus drátu připojený k tišťáku, který by mohl, ale kdoví, jak moc, sloužit jako protiváha (soudím tak podle velikosti GND na zadní straně PCB). Ale protože uznávám, že mám v tomto oboru značné mezery, radio záležitosti jsou černá magie a soudruzi ze Švýcarska si za to nechávají velmi dobře zaplatit, tak asi vědí, co dělají.

Velmi taky záleží na umístění antény. Na závodech jsem viděl anténu dvěmi pásky přichycenou k železné trubce, nebo schovanou pod uhlíkovou haubnou – tam bych ani u krabky za bratru 900 ojro nepočítal, že bude k něčemu užitečná. A u jednoho borce z Křižanova jsem viděl i kombinaci obojího :D.
Za velmi slabé ukázky bych uvedl například DDEB14 a DDDDC9, kde je signál ovlivněn jak umístěním, tak zřejmě i pilotem. A najdou se i horší případy.
Jak bude čas a síla, pokusím se udělat analýzu signálu z dat nasbíraných během léta (mám toho nějakých 20GB) a statisticky porovnat jak dosah FLARMů, tak i OGN Cube ONE krabiček a samozřejmě i ostatních trackerů, které jsou ke spatření na našem nebi (data jsem ukládal pro kluzáky do vzdálenosti 150km od LKKA).
Pokud byste měli někdo chuť takovouto analýzu provést (za účelem větší nestrannosti, neboť statistice, kterou si sami nezfalšujete, se přece nedá věřit), dal bych data volně k dispozici (samozřejmě jen důvěryhodným jedincům 😉 ).