Spousta lidí se opakovaně ptá, zda lze adaptér KRT2BT použít k odesílání frekvencí přímo z navigačních aplikací LK8000, XCSoar nebo SkyDemon. A odpověď zní Ano, jde to! Zde je tedy popsáno, jaké konfigurační kroky provést, aby vám fungovalo.
Párování přes modrý zub
Tento krok je specifický pro každé konkrétní zařízení. Funguje na PDA se systémem Windows CE nebo telefonech se systémem Android. Dobré je zde upozornit, že zařízení s obrázkem ovoce bude většinou ignorovat všechna zařízení bez specifického Apple ID – tj. včetně našeho krtkomodrozubu.
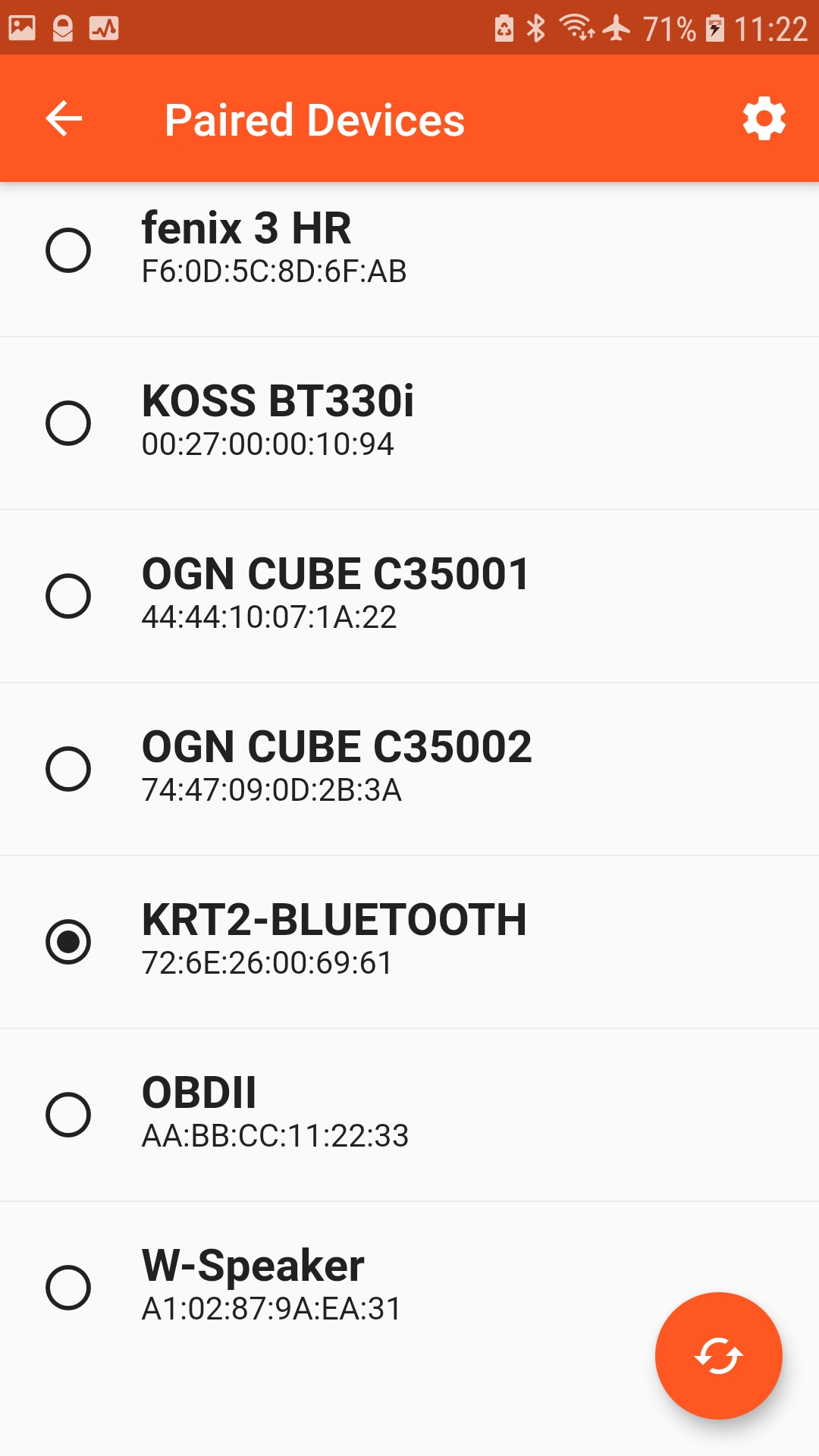
Obecně se to dělá tak, že zapnete/aktivujete v telefonu/PDA bluetooth a necháte jej vyhledávat modrozubová zařízení ve vašem blízkém okolí. Ta vysílají po zapnutí (včetně KRT2BT) paket, kterým ohlašují svou přítomnost, nicméně pouze za přepokladu, že nejsou v tu chvíli již připojena k jinému telefonu/PDA. Po spárování a připojení se tyto beacony nevysílají a tudíž tato zařízení nejsou vidět(!). Adaptér KRT2BT se při vyhledávání ohlašuje jménem KRT2-BLUETOOTH (nebo KRT2BT) a pro spárování vyžaduje tajný pin 1234.
Před následujícími kroky se tedy ujistěte, že párování proběhlo úspěšně.
Nastavení LK8000
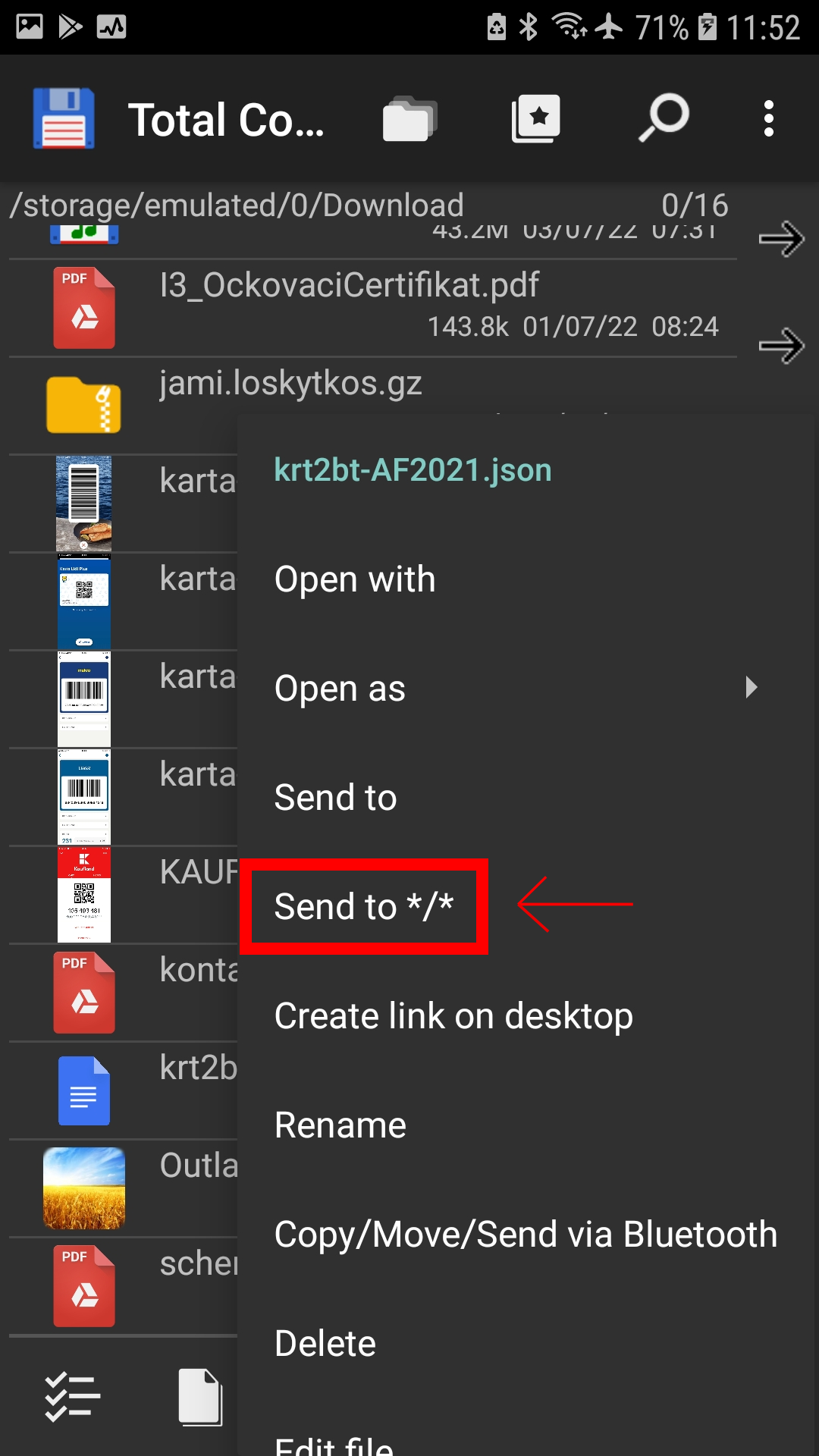
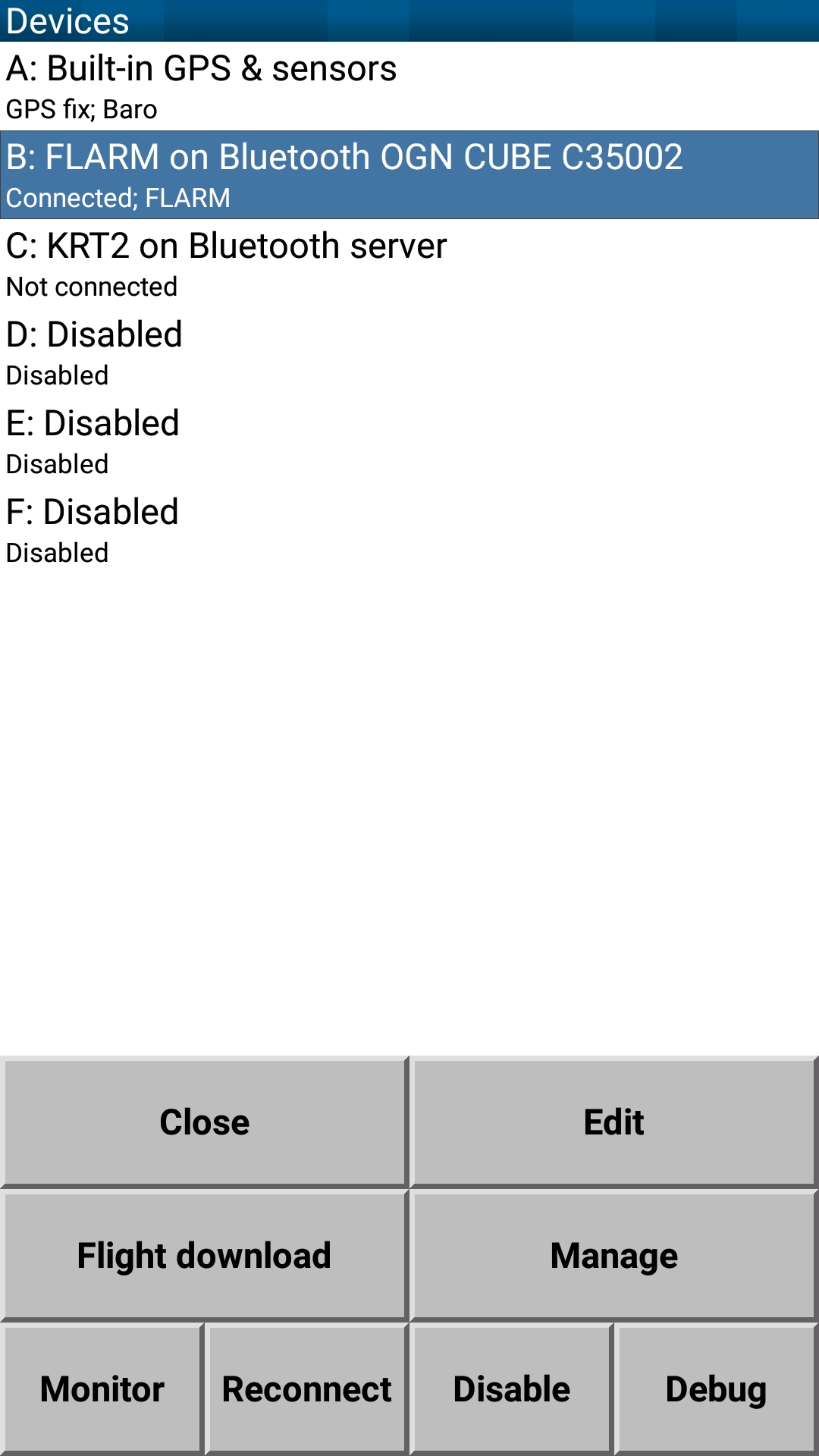
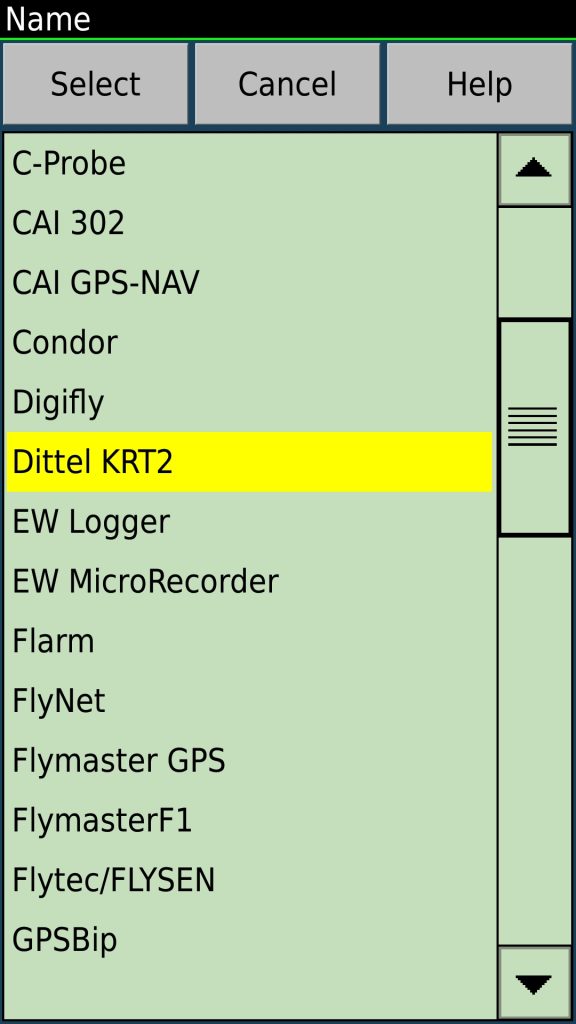
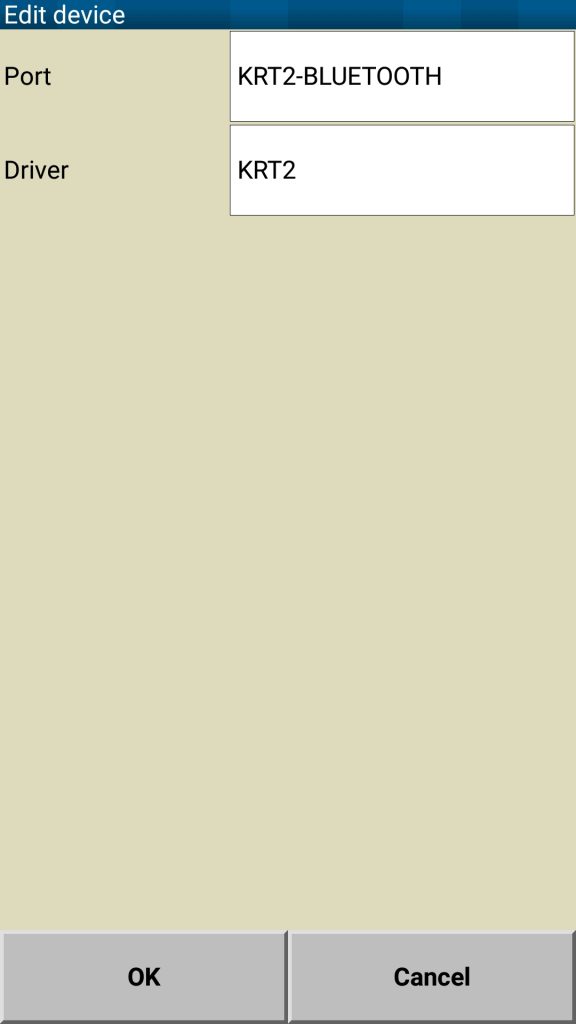
Spusťte LK8000 a ťupněte na (M)enu -> Nastavení -> Nastavení -> Nastavení LK8000 -> Nastavení zařízení. Zde jdou pod kartami A-F vidět již nakonfigurovaná zařízení, přičemž hned po instalaci jsou pod A nastaveny interní snímače / zdroje dat jako GPS a baročidlo (pokud jej tam máte). Zde zvolte nepoužitou kartu (v případě na obrázku níže jsem zvolil C) a ťupněte na volbu Jméno (Name), kde vyberete ‚Dittel KRT2‘. Dále pokračujte volbou portu, kde zvolíte již dříve spárovaný krtomodrozub. Na různých telefonech/PDA to může vypadat různě, v tomto případě to bylo BT_SPP:KRT2BLUETOOTH. Určitě na to přijdete ,)
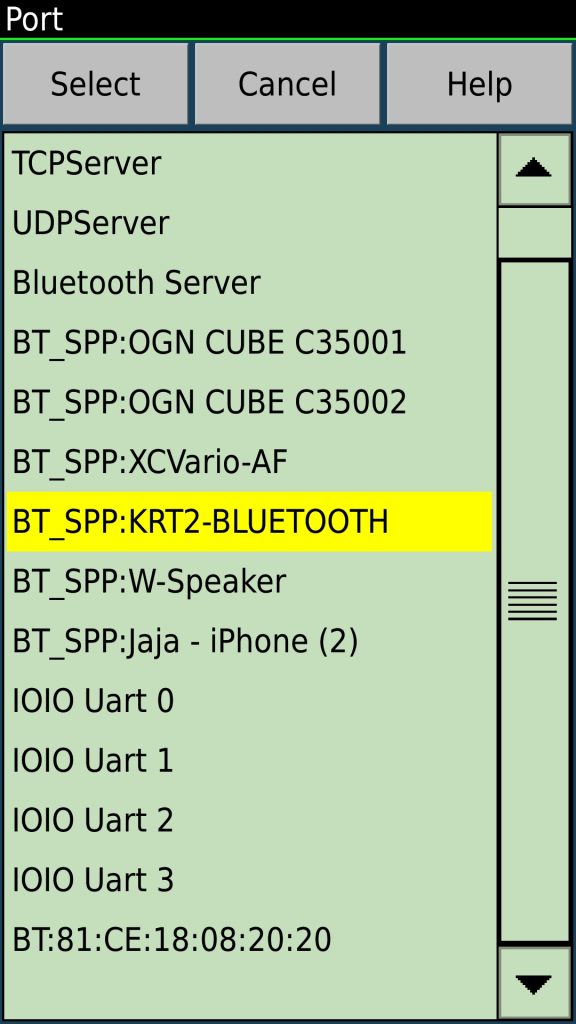
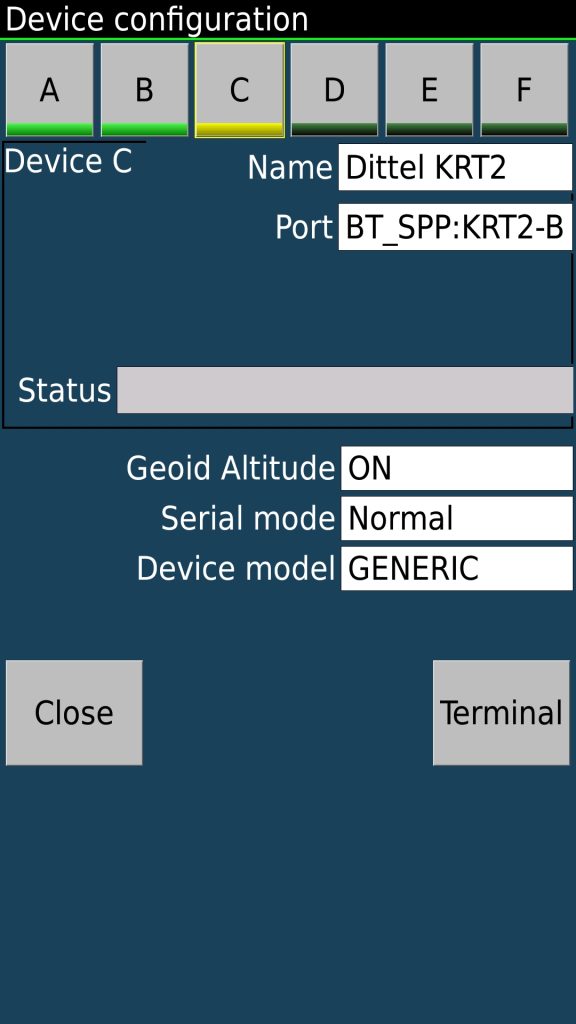
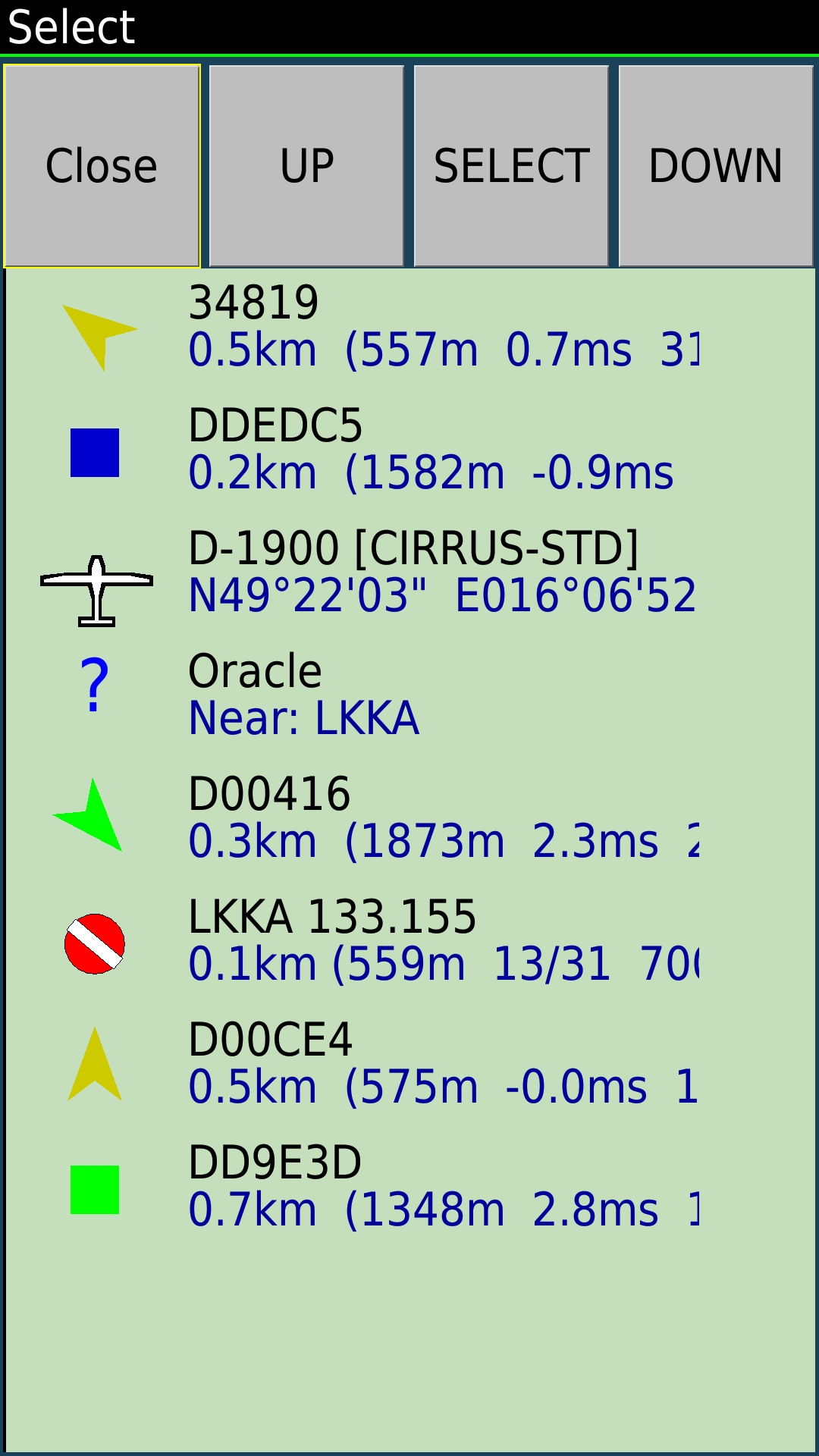
Zde lze i vidět, že podobně lze připojit i dalčí zařízení, jako například OGN Cube, díky kterému pak lze spatřit okolní provoz ostatních letadel vybavených OGN krabičkami různých výrobců 🙂
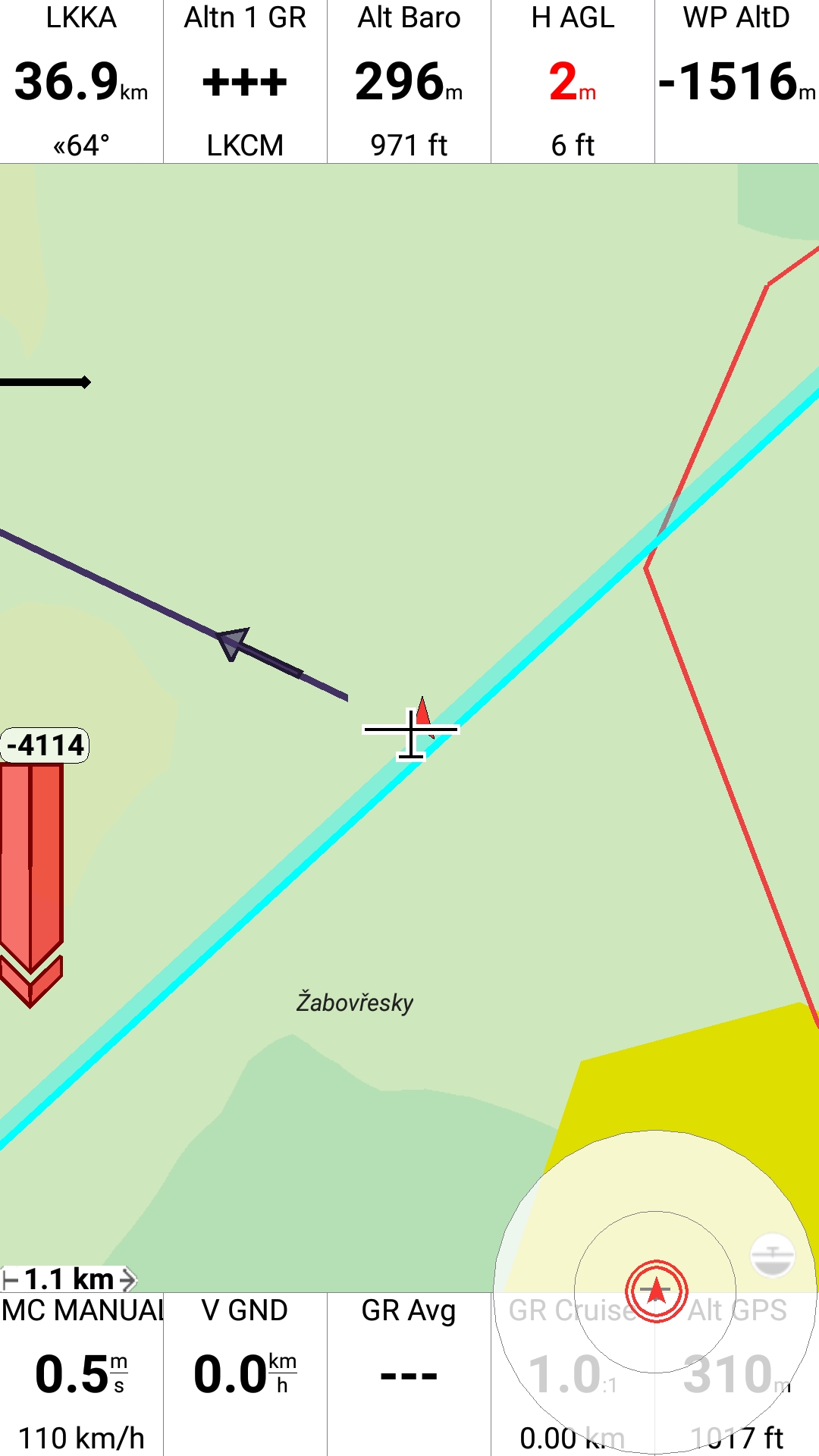
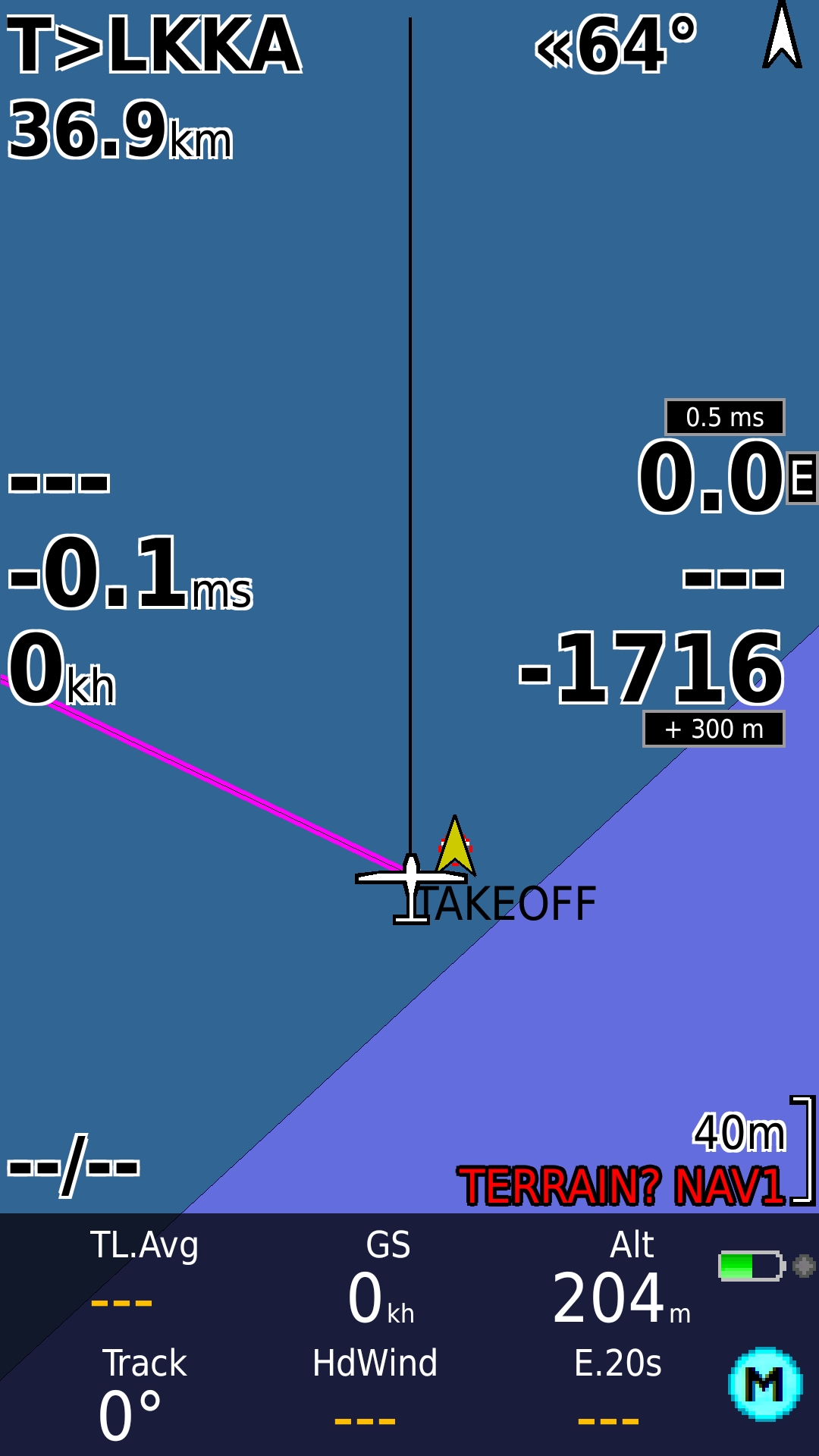
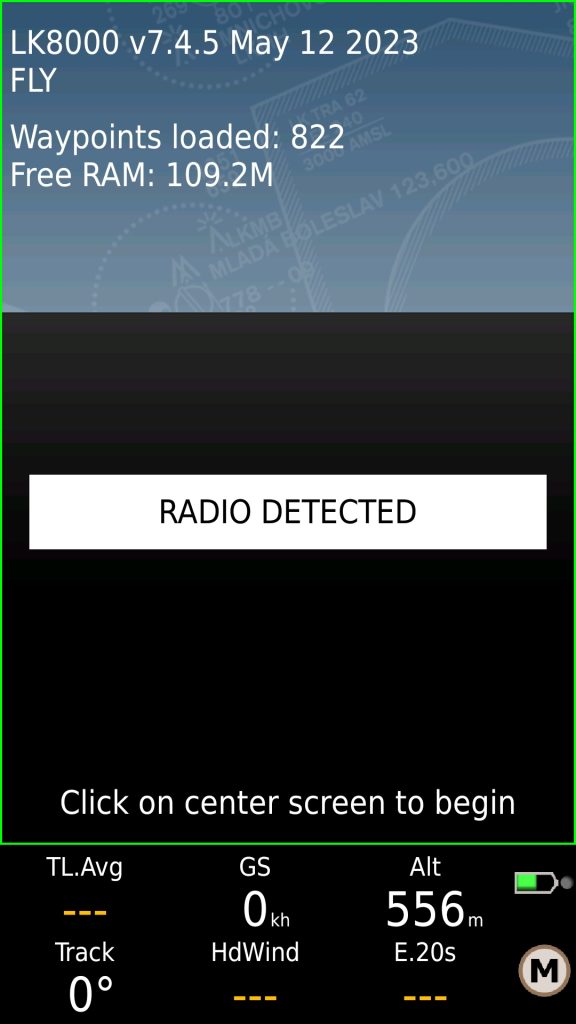
Jakmile je toto nastavení hotovo, opusťte menu zpět na náhled mapy. Mělo by dojít k automatickému znovunačtení komunikačních portů a v případě úspěšné detekce rádia se zobrazí hláška, RADIO DETECTED (nebo podobně). Pokud by nedošlo k automatickému resetu portů, je třeba aplikaci restartovat. Jak to přibližně vypadá, vidíte zde:

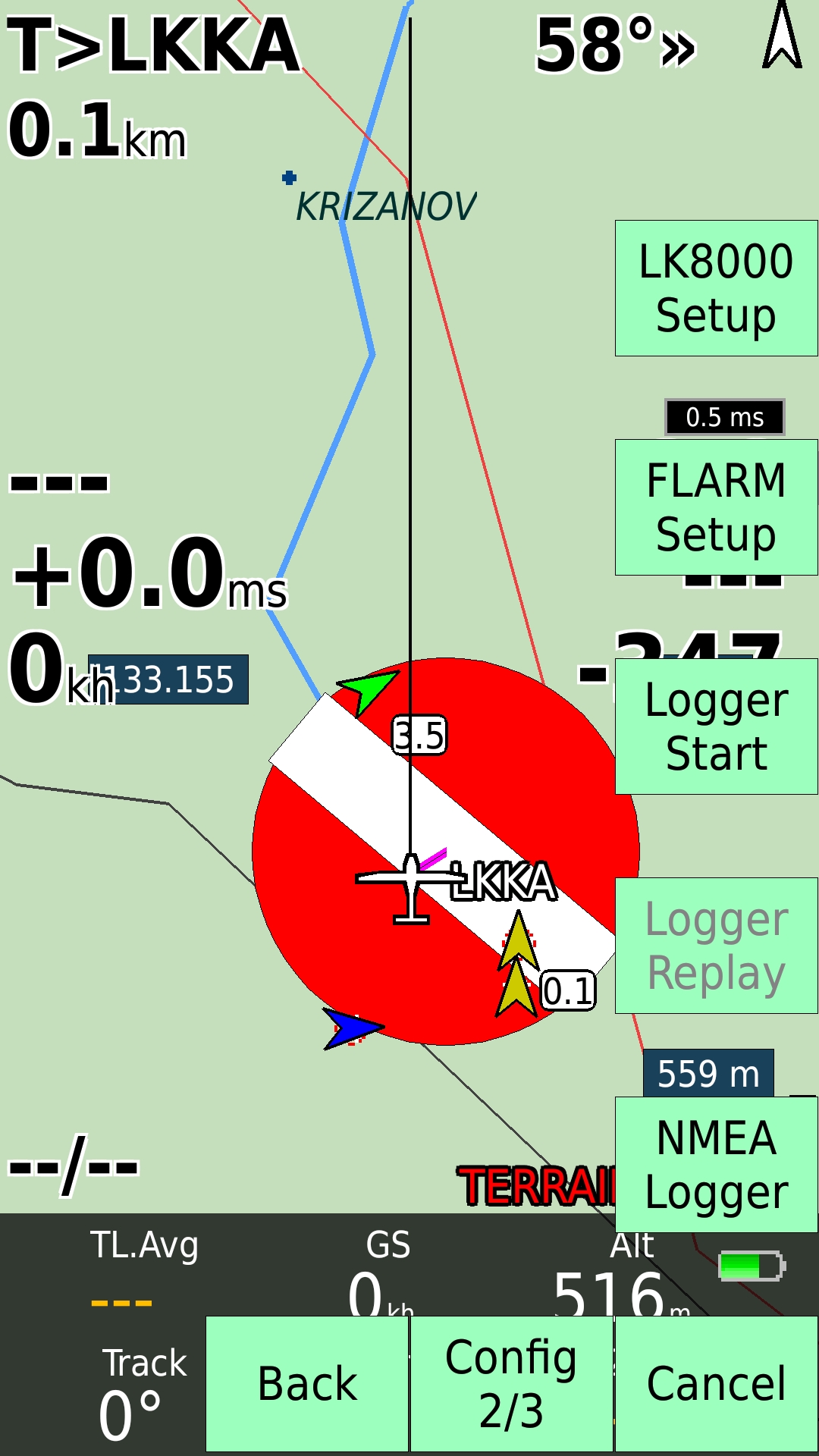
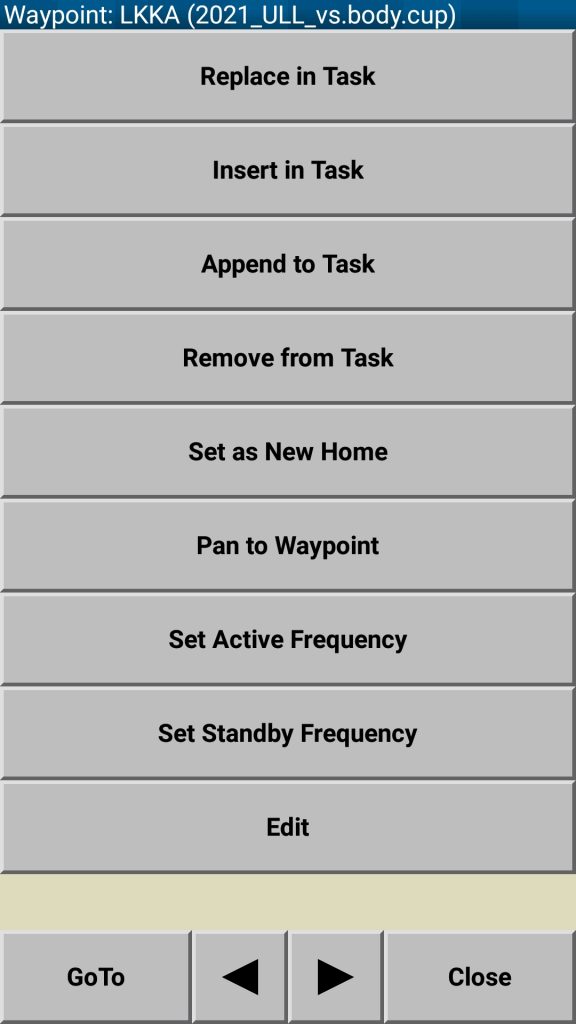
Krtek je tedy připojen a je možné jej ovládat z LK8000. V menu se objeví nové volby pro poslání frekvence letiště (uložena v seznamu otočných bodů) a ručního zadání frekvence, přičemž tu je možné nastavit jako aktuální (horní řádek na rádiu) nebo záložní (spodní řádek).
Nastavení XCSoaru
Toto je velmi podobné postupu u LK8000. Ťupnutím na obrazovku se objeví menu, zvolte Konfigurace -> Zařízení, přičemž zde je opět seznam nastavených a prázdných slotů A-F.
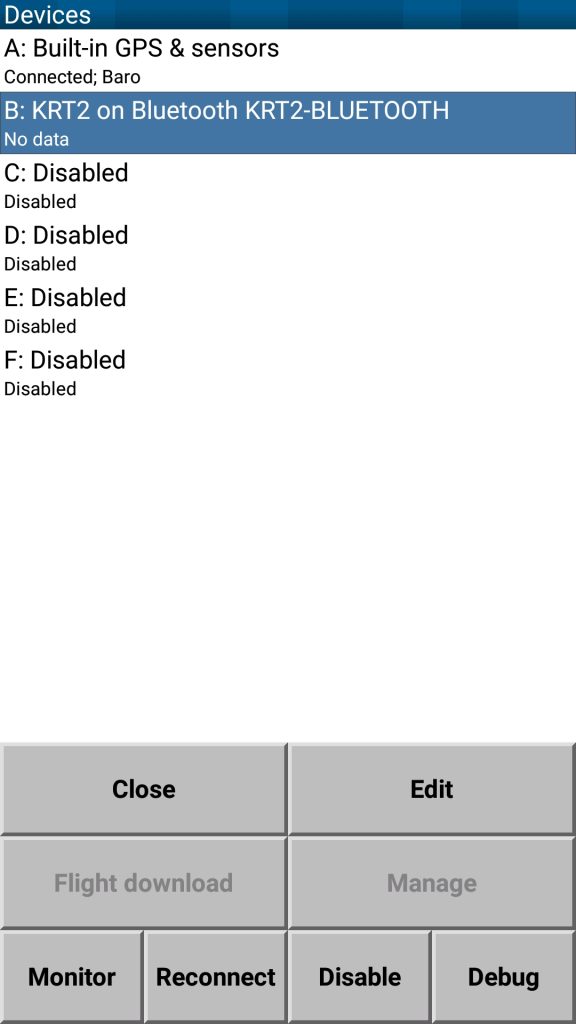
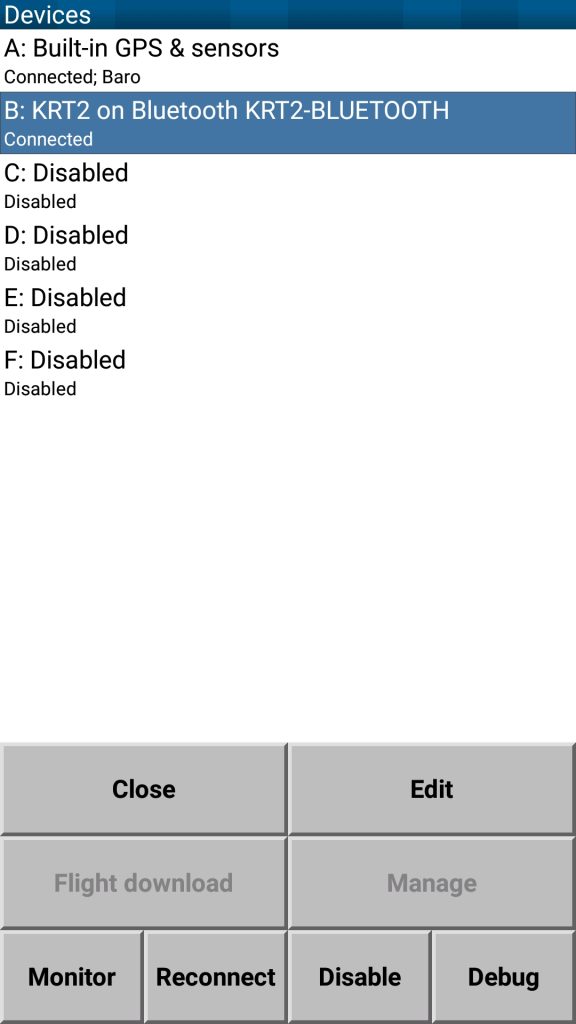
Vyberte si prázdný slot a nastavte spojení tak, jak je na nastíněno na obrázcích nahoře. Dokud nebylo rádio detekováno, je zde zobrazeno ‚No data‚ – znamená to, že spojení buď nefunguje, nebo ještě nedorazil paket, kterým krtek oznamuje svou existenci. Jakmile se spojení povede, zobrazí se zde ‚Connected‘.
Po připojení rádia se podobně jako v LKčku v menu objeví nové možnosti jak poslat zvolenou frekvenci do krtka.
Nastavení SkyDémona
Jak použít bezdrátové spojení krtka a SkyDémona najdete na youtubu v těchto videích:
- Konfigurace modrozubu: https://youtu.be/cNvP-3EQgXM?si=ivpw7XcZmbTwQlv0
- Posílání frekvencí do rádia: https://youtu.be/VQu1idSFLSI?si=yYjlezzG2X148Qlu
V případě SkyDemona je v některých případech (na některých telefonech) třeba přeskočit krok párování telefonu s KRT2BT adaptérem a nechat to na SkyDemonovi, aby si s tím poradil sám. Po ukončení SkyDemona nezůstane v nastavení modrého zubu žádný záznam, ale komunikace s rádiem by měla fungovat. (Přijde mi to divné, ale je to skutečně tak.)
No a to je všechno! 🙂
Samozřejmě nezapomeňte, že ke krtkomodrozubu ještě existuje skvělá aplikace KRT2Bluetooth pro androidí telefony, přes kterou si můžete nastavit frekvence přímo v paměti vašeho krtka. Více se o ní dozvíte tady!