I am constantly receiving inquiries whether the KRT2BT adapter can be used to send frequencies directly from the LK8000, XCSoar or SkyDemon navigation applications. The answer is Yes it can! and this post will show you in detail what are the necessary configuration steps.
Bluetooth Pairing
This step is specific for each device. Works on PDAs running Windows CE or phones with Android. Please note, that Apple-based product will mostly ignore all devices without specific Apple ID – including the KRT2BT module.
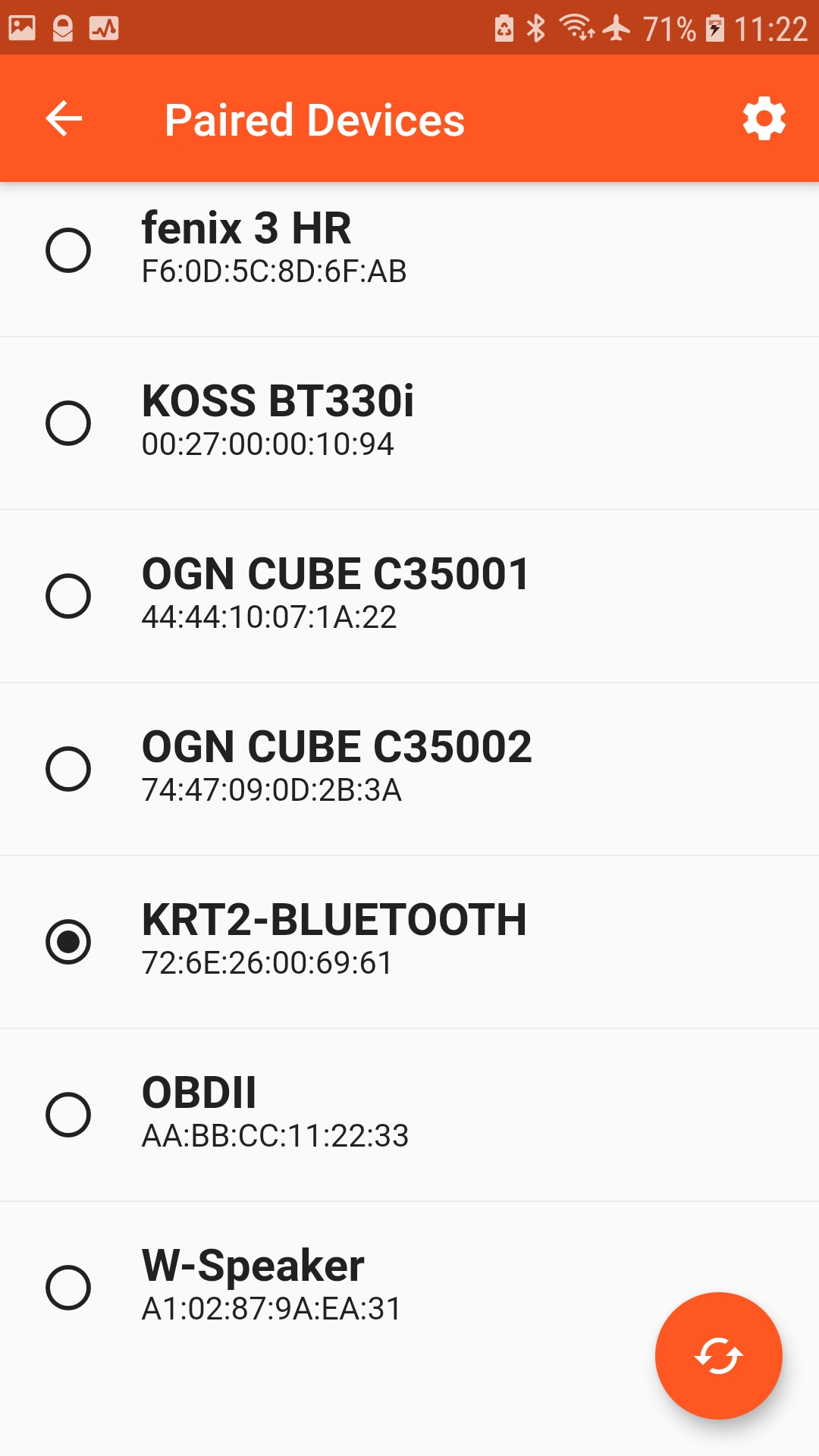
In general, turn on the bluetooth in your phone/PDA and search for available bluetooth-enabled broadcasting gadgets. When powered on, the devices (including KRT2BT) broadcast a here-I-am bluetooth packet when not connected to another phone/PDA. Once paired and connected, the beacons are not broadcast and hence are not visible (!)
The KRT2BT adapter announces itself as KRT2BT and will require pin 1234. Before proceeding with the next step please make sure the the device is paired.
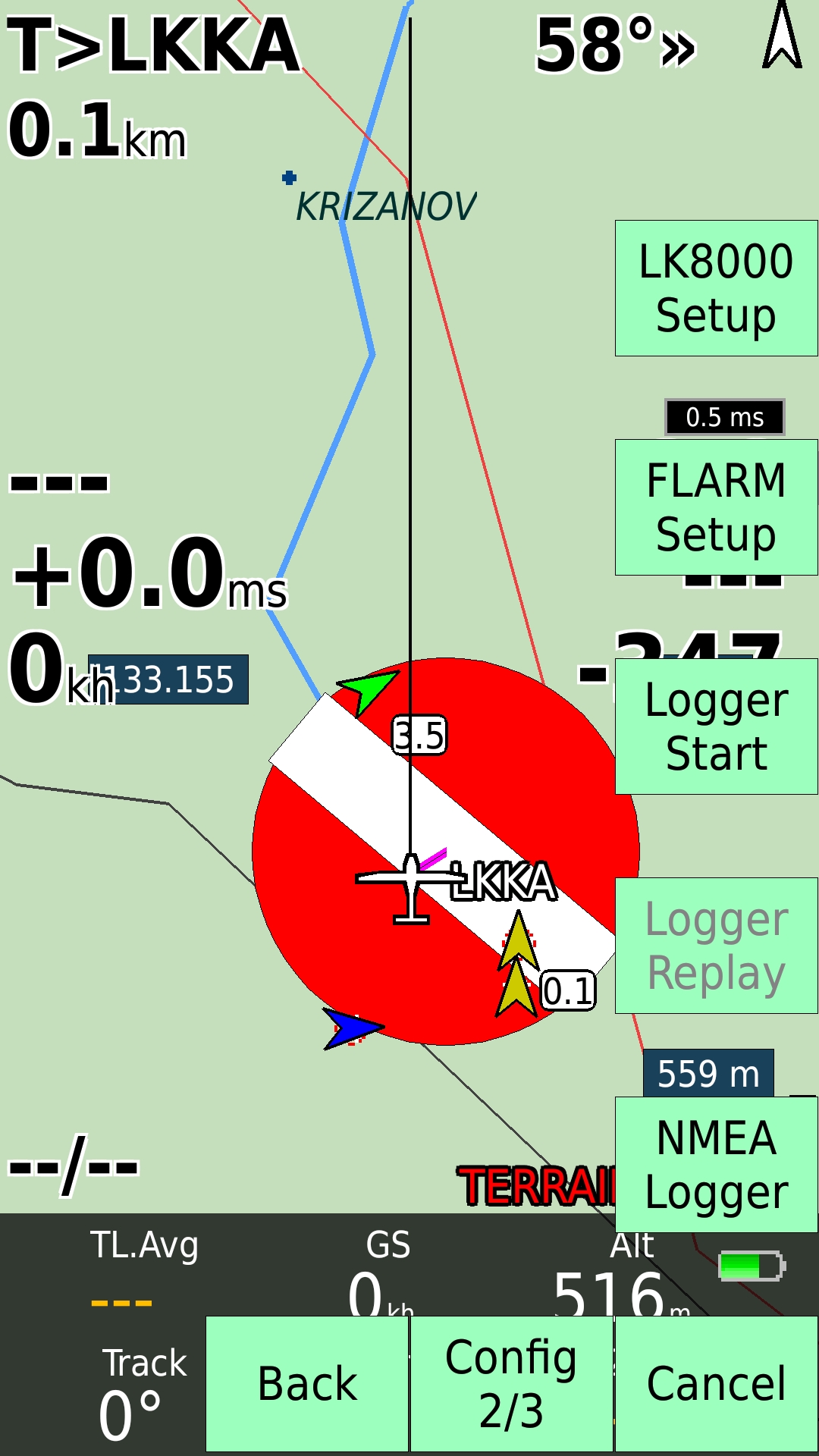
LK8000 Configuration
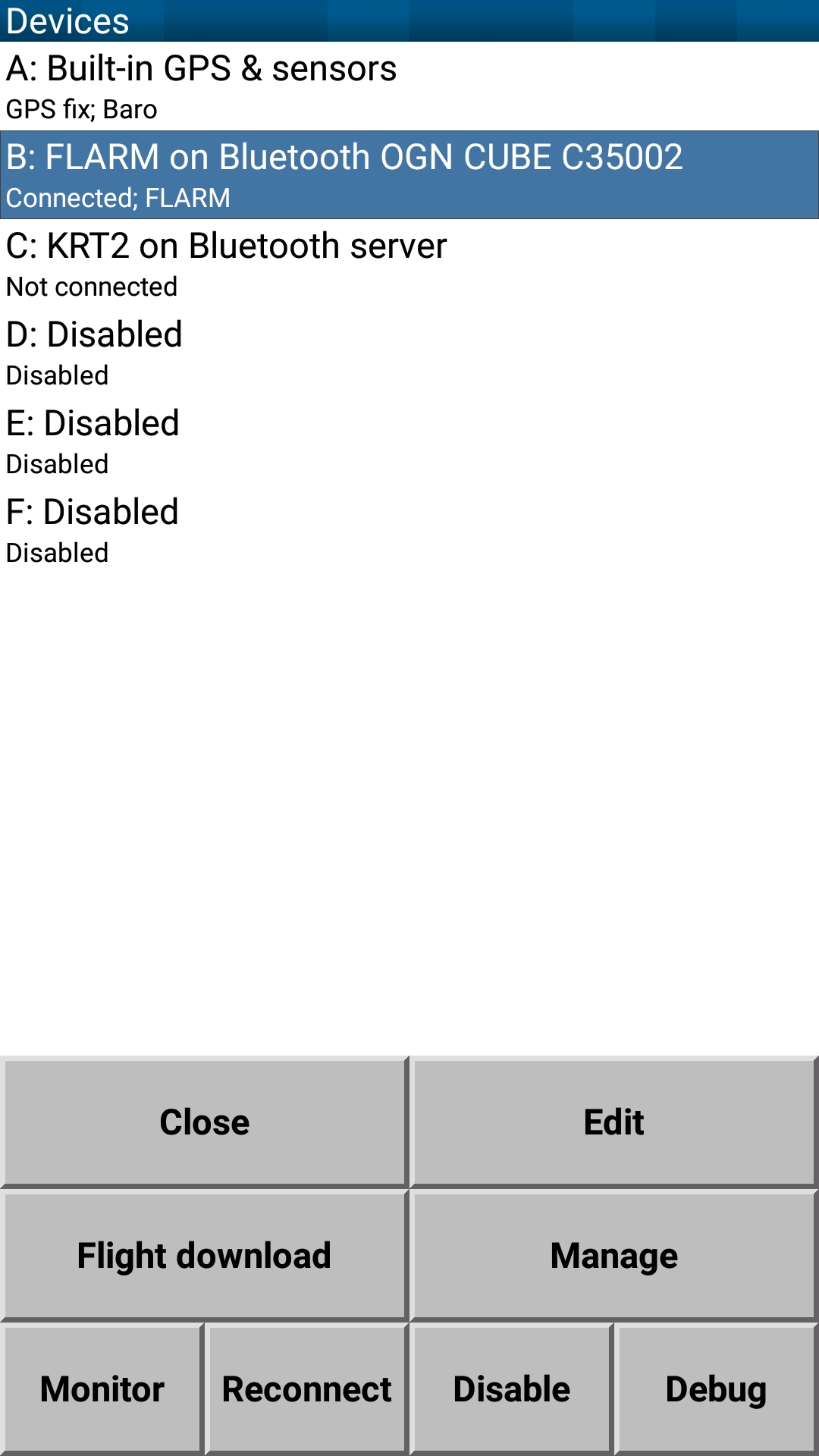
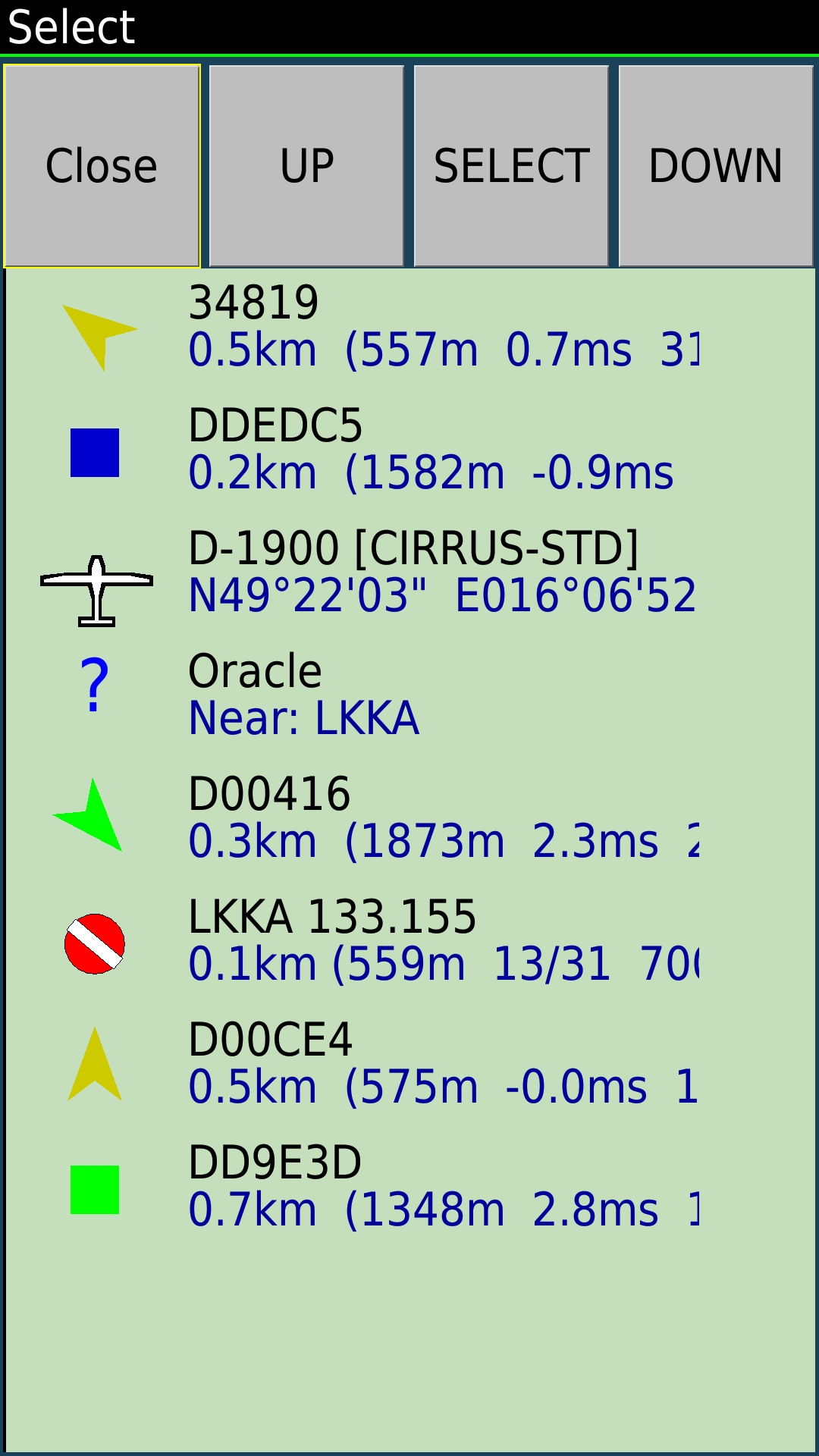
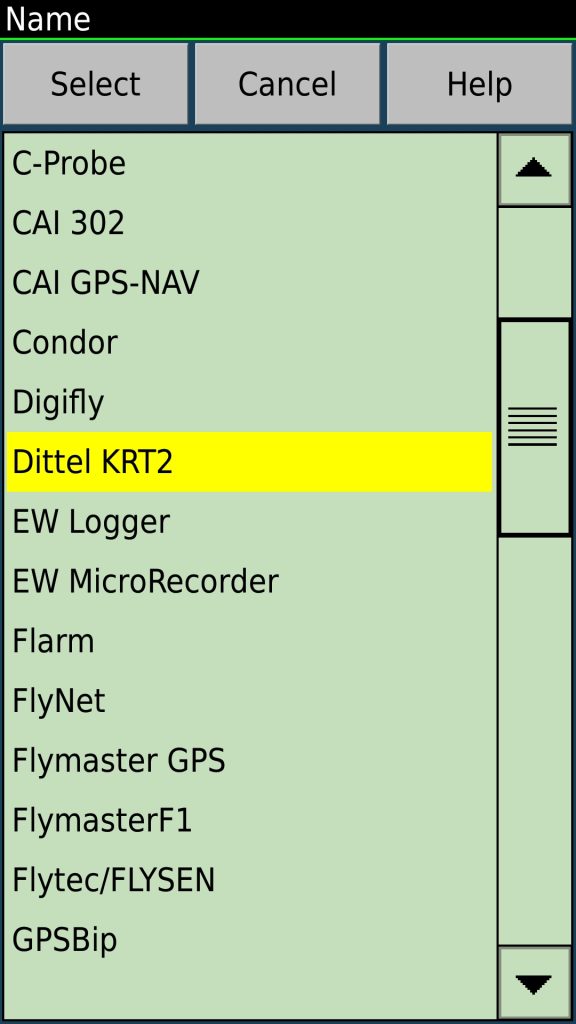
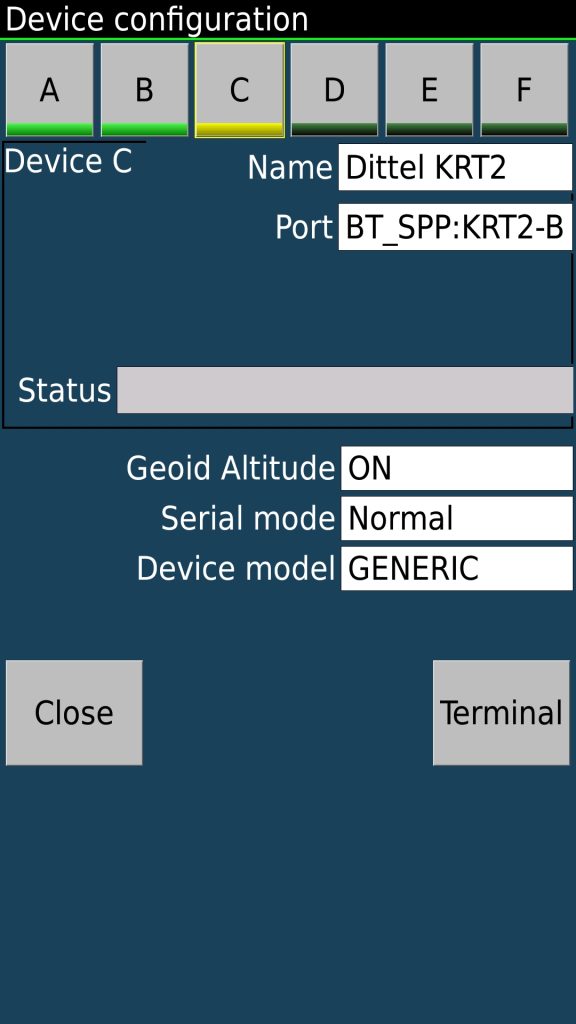
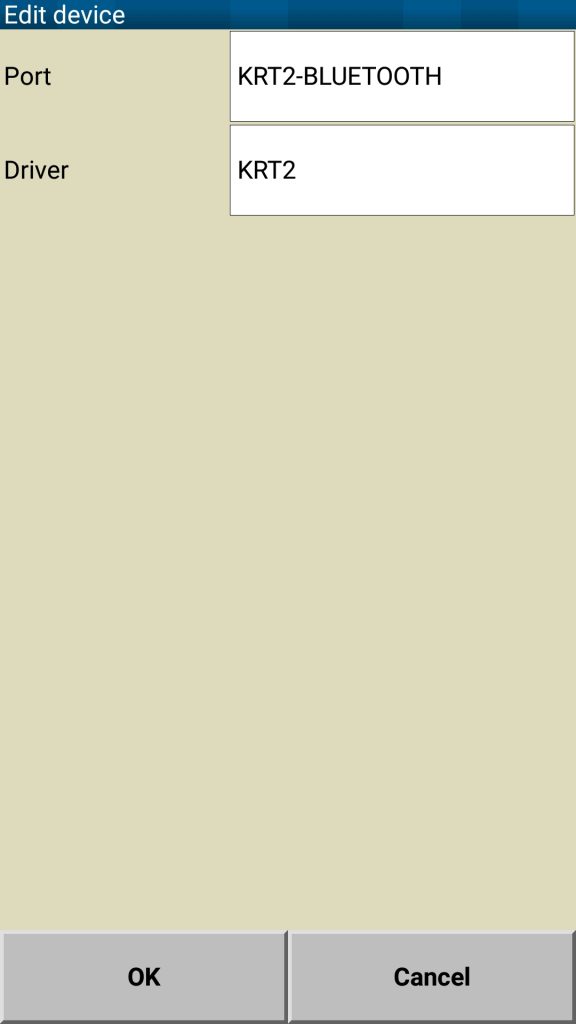
Run LK8000 and tap (M)enu -> Config -> Config -> LK8000 Setup -> Device Setup. On this screen you see currently configured devices under tabs A-F where in default installation on Android phone the A is the Internal sensors (GPS & barometric if available). Pick an unused one and in the Name field select ‘Dittel KRT2’. Then tap onto the Port field and select your paired bluetooth device. This will vary depending on your system but you will surely find the right one easily:
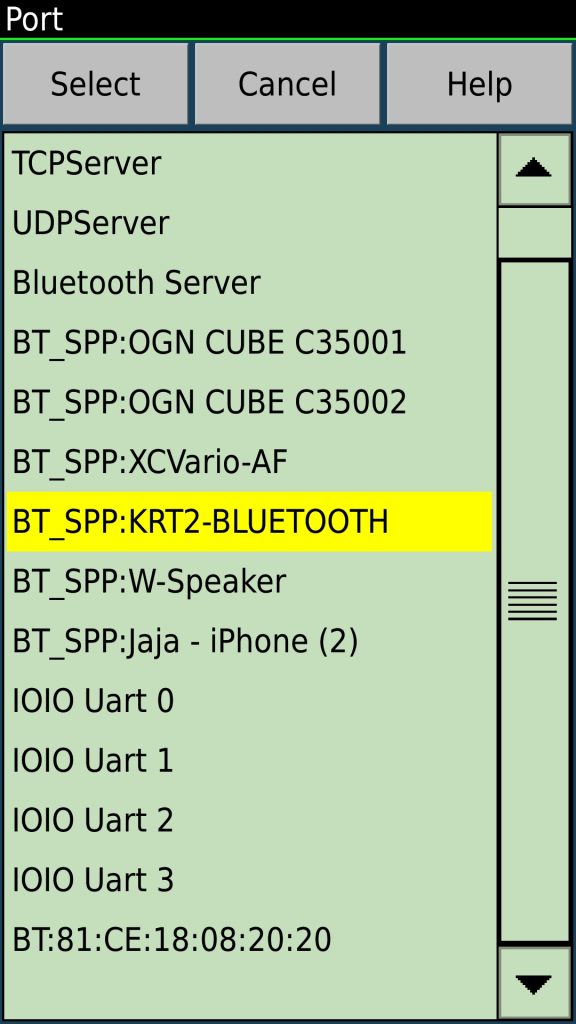
Here you can also see that the same way you can configure reception of the traffic information received by the OGN Cube units 🙂
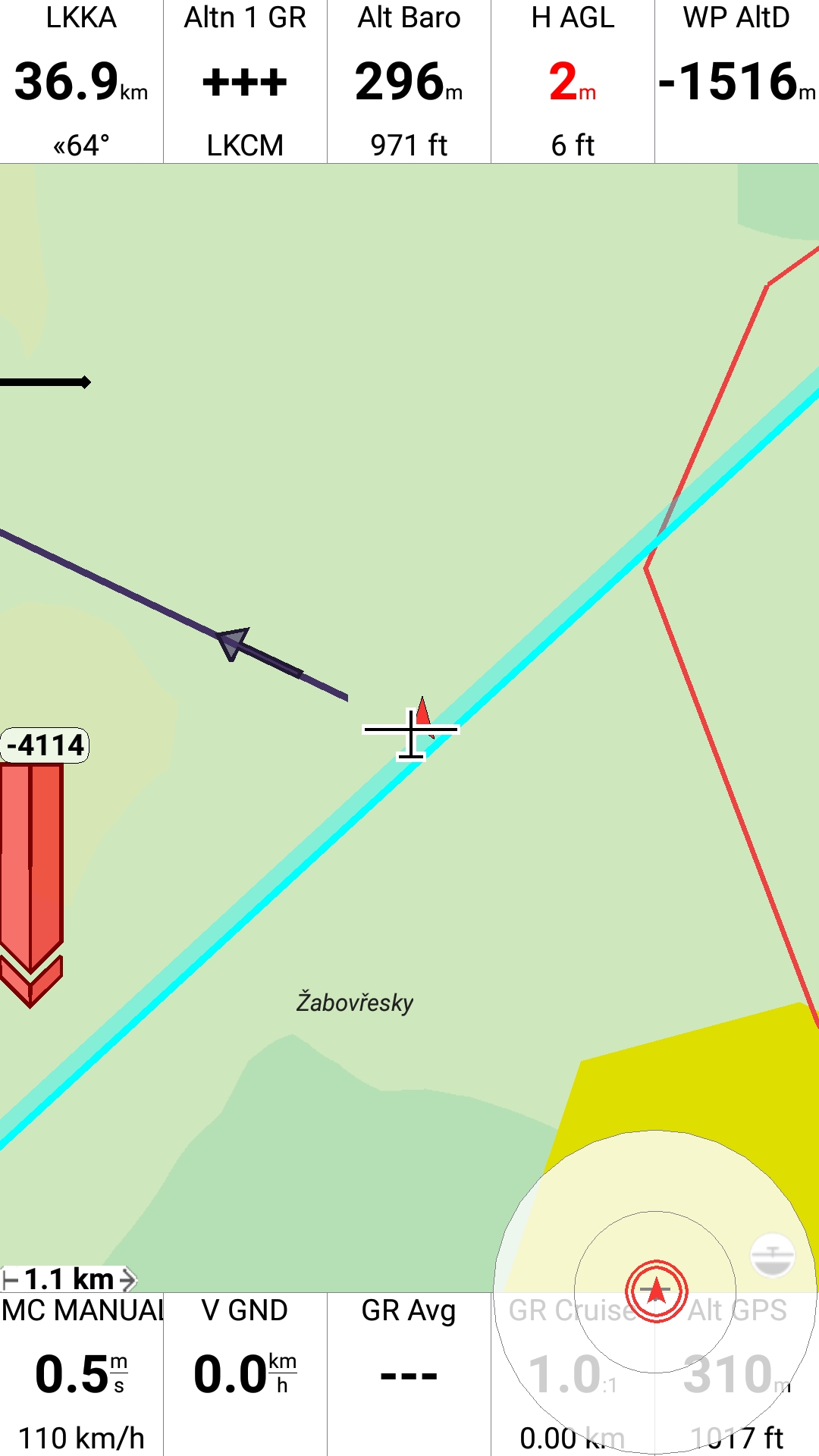
Once this setup is done you can exit the configuration menu and either wait until the LK8000 will reset the ports by itself (takes sometimes a bit longer) or just restart the application which forces the communication ports to be restarted. Once the radio is connected you receive the following message on screen:
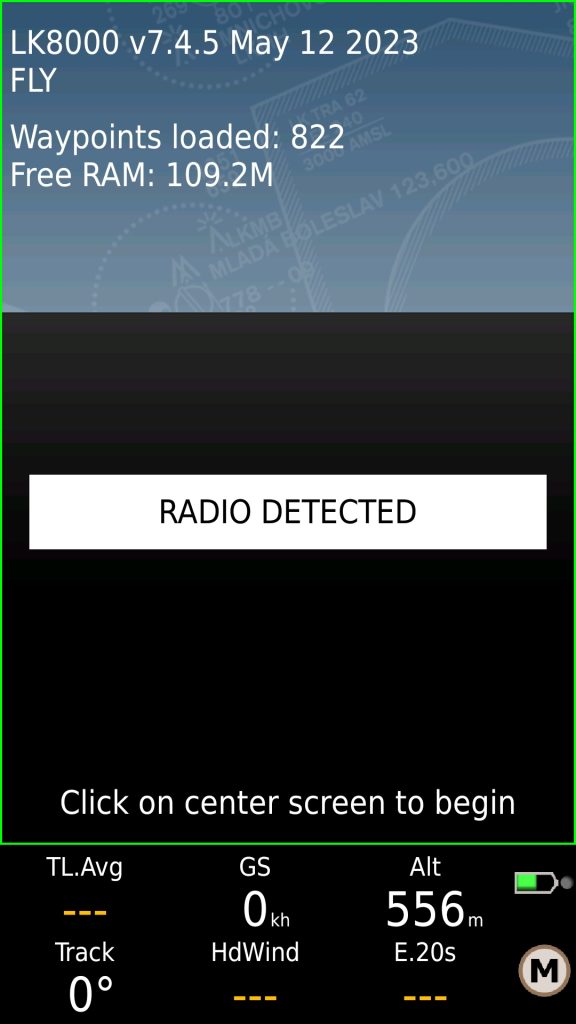

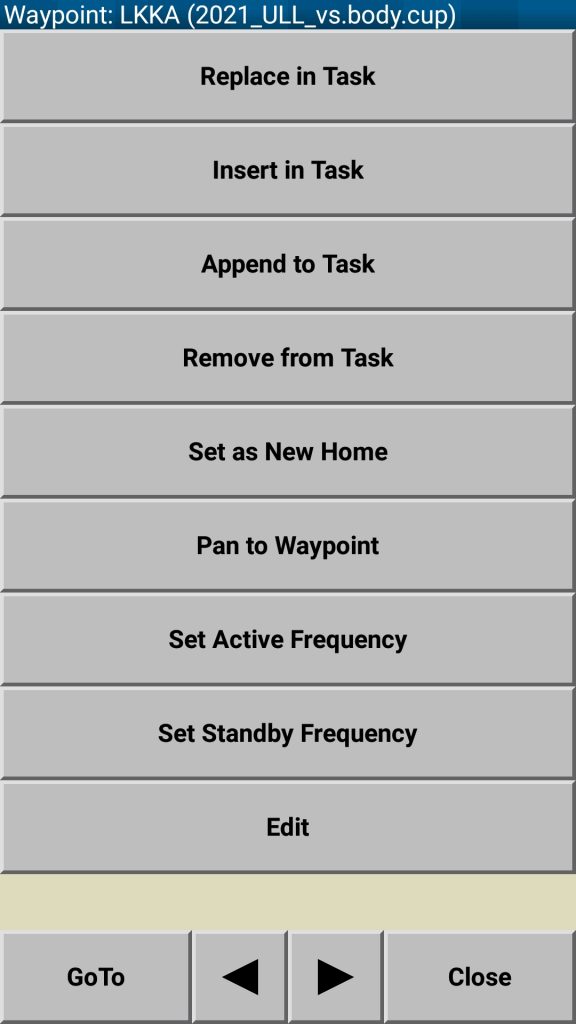
This indicates the KRT2 radio is connected and can be controlled from the LK8000 app. Now you can find there are new entries in the menu where you can send airfield frequency to the radio or manually enter a custom frequency and send it to the top (current) or bottom (backup) position in your radio.
XCSoar Configuration
This is very similar to the setup above. Tap on the screen for the menu to pop up and go Config -> Devices. Here you can see already configured or empty configuration slots A-F.
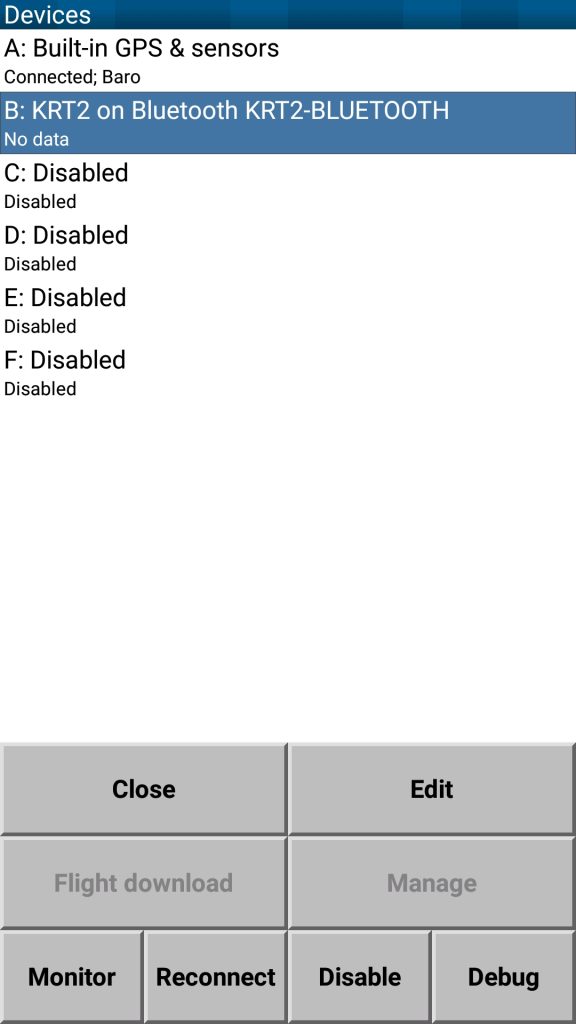
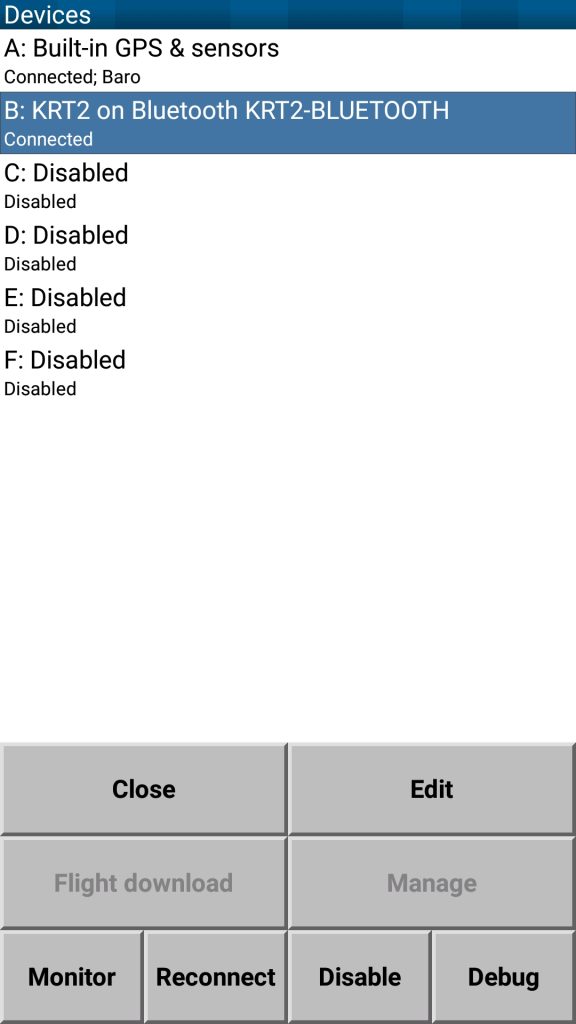
Tap on one unused slot or a slot you want to replace/edit and as configure as depicted above. Until the radio is not connected (XCSoar has not received the KRT2 radio announcement packet) you will see ‘No data’ show below the device. After the connection is established this changes to ‘Connected’.
Similarly to LK8000 now you can send an airfield’s frequency directly into the KRT2 radio or configure and arbitrary frequency elsewhere in the menus.
SkyDemon Configuration
How to set-up and SkyDemon is nicely shown in the following youtube videos:
- Bluetooth to RS232: https://youtu.be/cNvP-3EQgXM?si=ivpw7XcZmbTwQlv0
- Sending Frequencies to Radios: https://youtu.be/VQu1idSFLSI?si=yYjlezzG2X148Qlu
At some occurences (certain devices which are difficult to specify) it is necessary to skip (omit) the bluetooth pairing step between your phone/tablet and the KRT2BT unit and let the SkyDemon to resolve the connection by itself. Even after quitting SkyDeamon there is no connection configured in the phone’s bluetooth settings menu but the communication does work.
And that’s it! 🙂
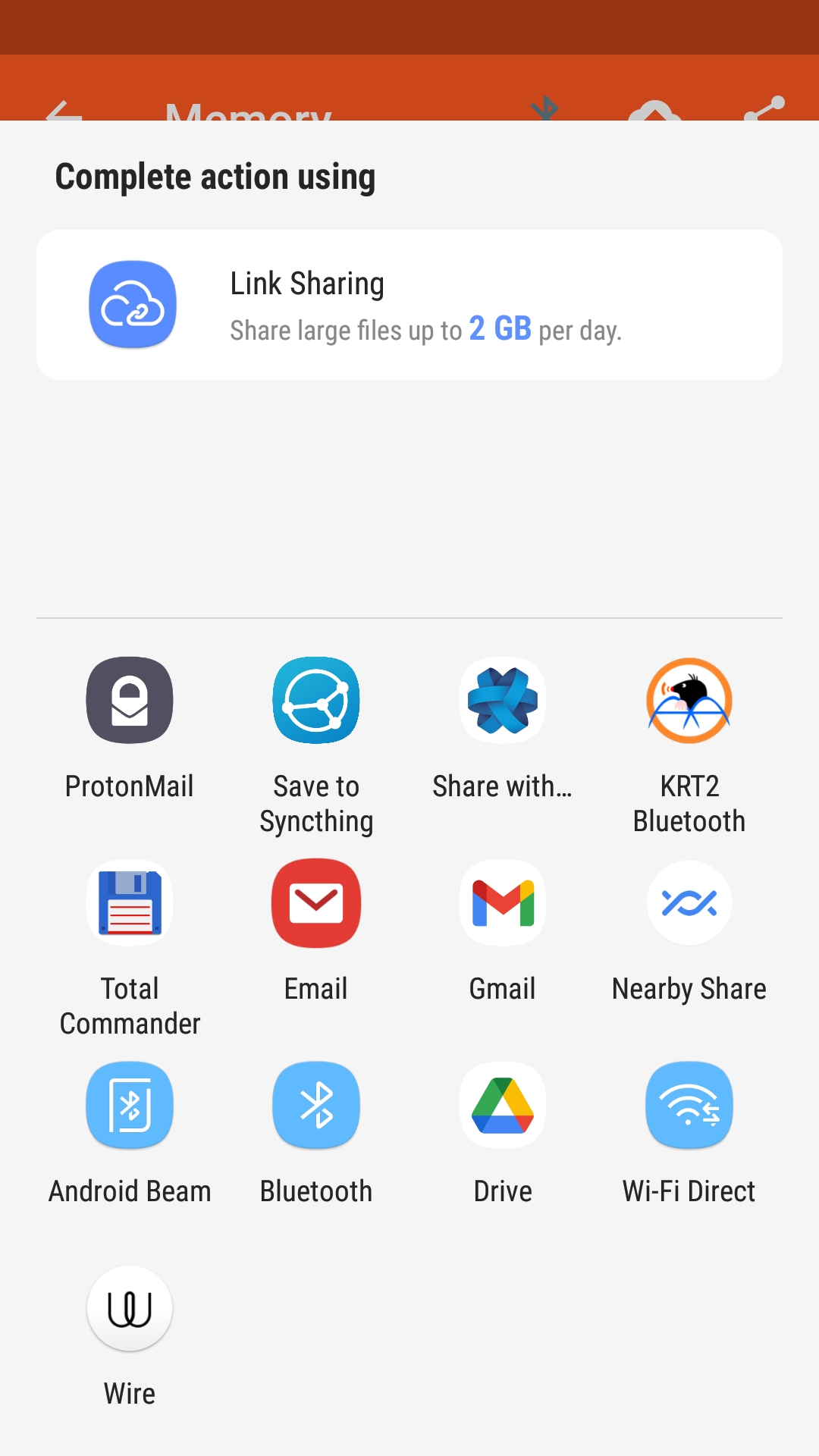
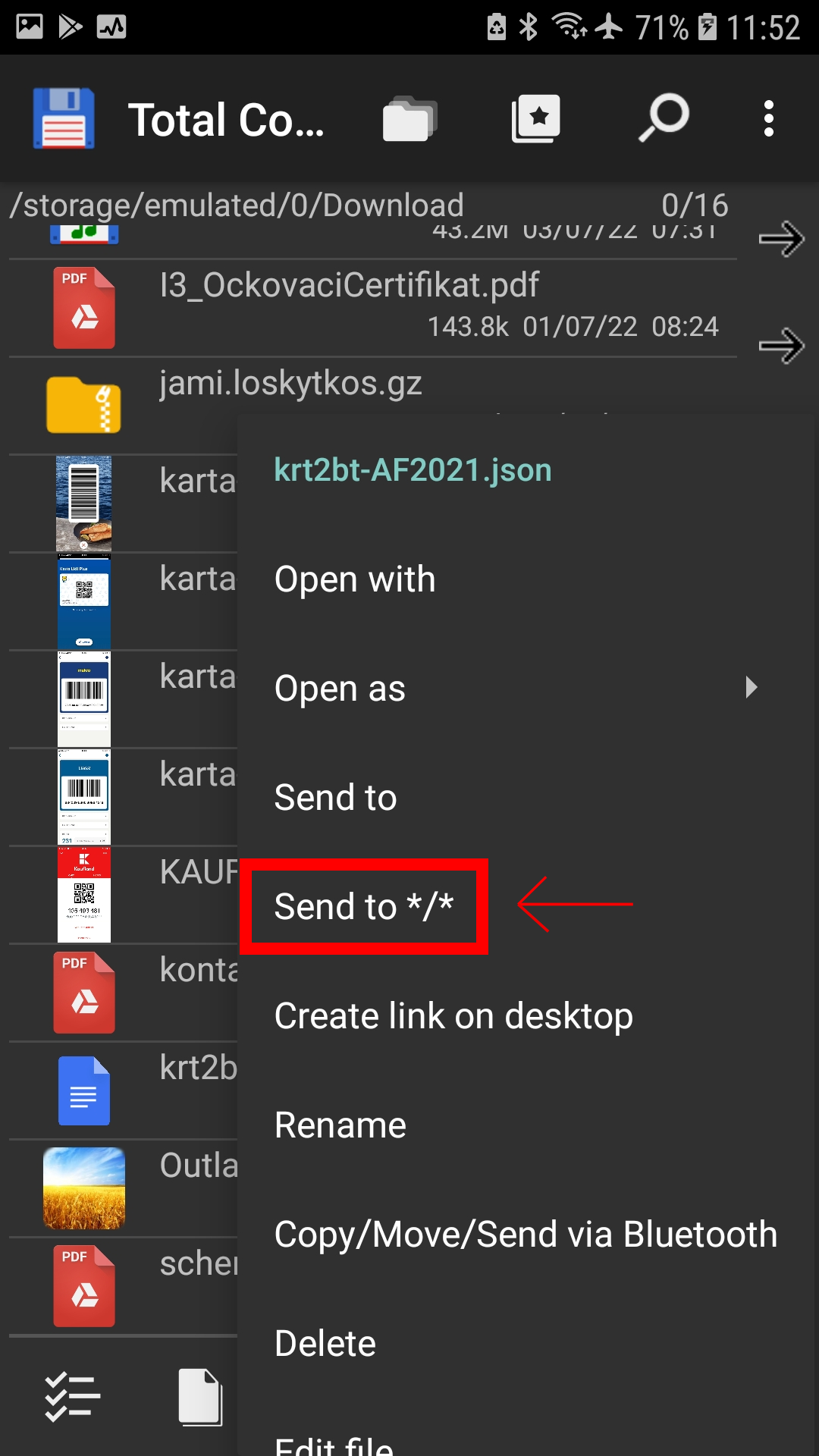
Also do not forget there is an KRT2Bluetooth application for Android phones to configure your radio’s memory positions! It has been featured right here!