

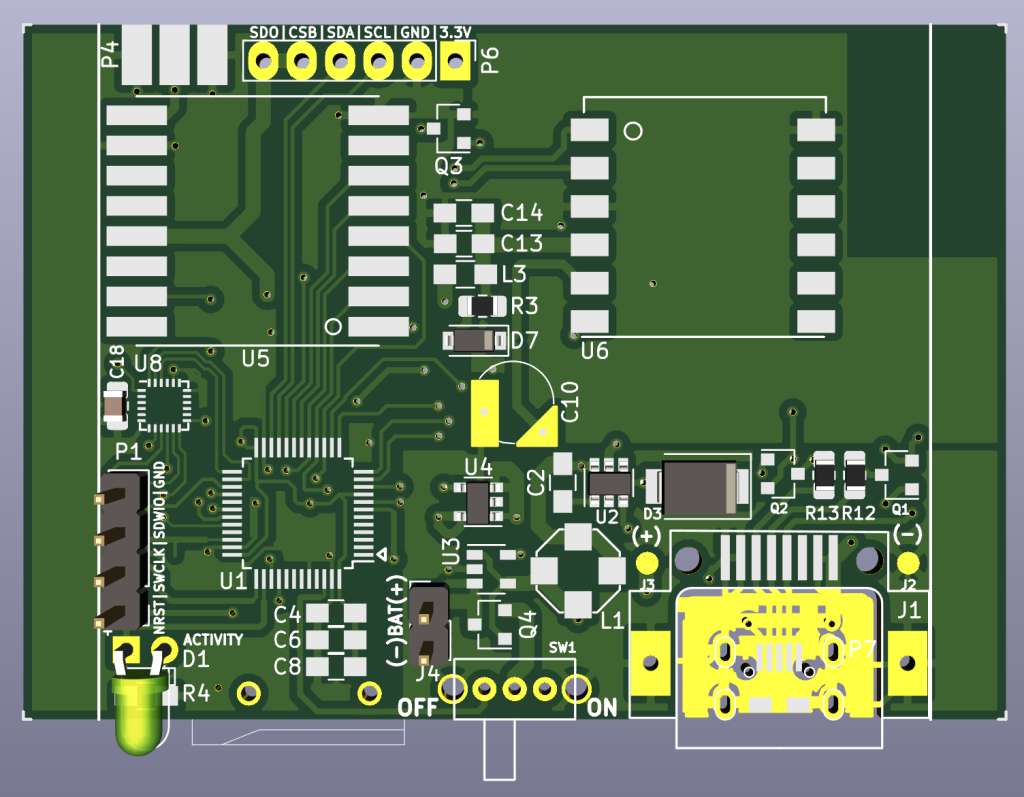
Over the Xmas “break” I finally saved some time to amend the schematic and add two new blocks. The first one is switched DC supply to eventually replace the linear regulator and thus save a lot of battery juice when powering the tracker directly from 12V on-board battery.
The second improvement or actually a new feature is footprint for the promised accelerometer / gyroscope on board. There are two solderable options – MPU-6500 or MPU-9250. The guys from Invensense did a reasonable job to put those in compatible package with only one extra jumper to be solder-bridged on the PCB when having populated the latter.
A third tiny gem is a miniature supercap on the backup input of the GPS module to retain last known location (for approximately 12 hours) in case of power outage. It shall be significantly faster than from a cold start!
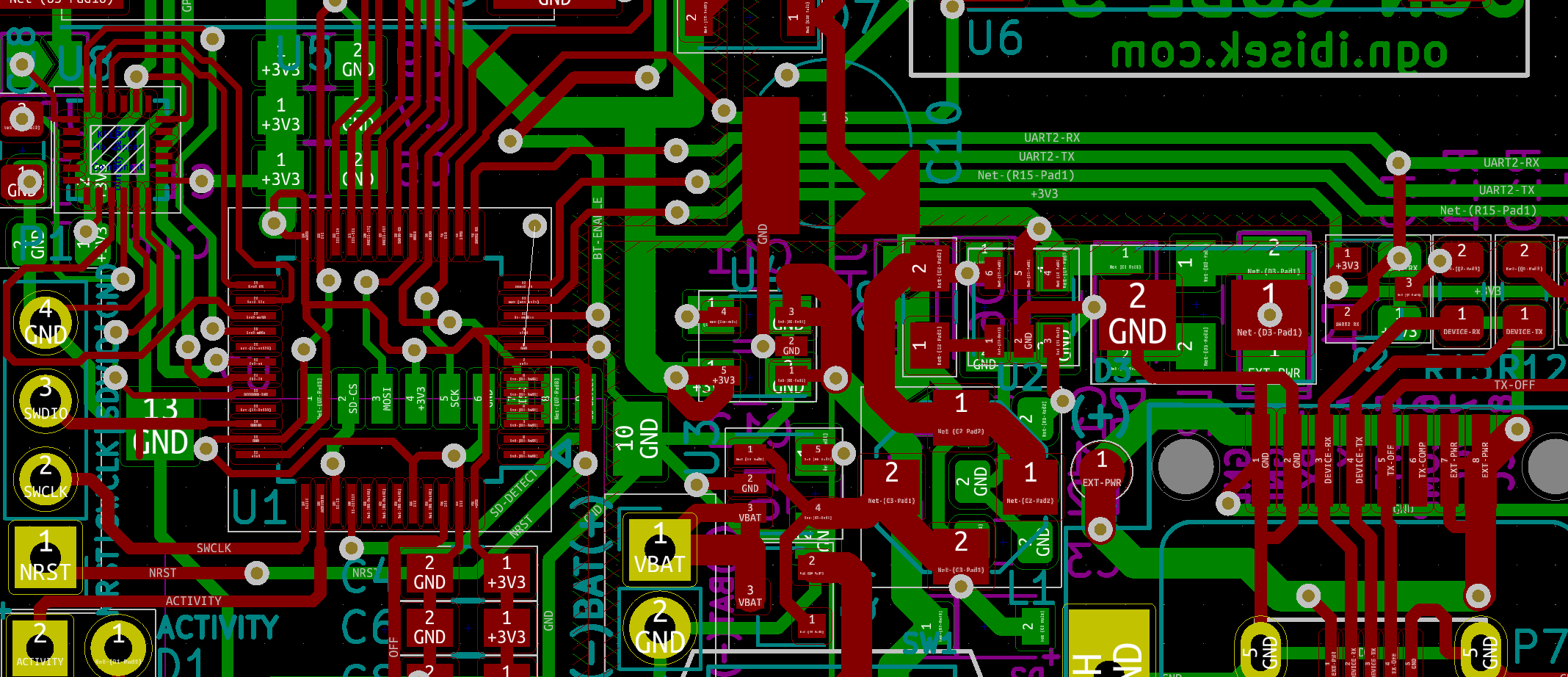
By routing the board I pushed again my capabilities way farther while putting in all the additional parts and saving space on the board as there were so many of them and the remaining free space was so scarce. Groovy!
A little thing still the bugs me a bit. It is mainly the MPUs are marked as “not recommended for new development” on Arrow and Farnell but hopefully will be still available for some time. And during that time the future will show whether this part is of any use and advantage or completely none 😉
The prototype board has been sent to production on 27th December and shall be finished in mid January. I presume a week later I should know if there are any problems on the board and the design will need some additional rework or not. I hope for the better, of course.
And then, finally, I will have to find someone who will help to manufacture the units because as I said last year – I will never solder so many boars by hand again! 🙂